1. Indice
2. Paginazione
Fin’ora quando parlavamo di memoria l’abbiamo sempre intesa come divisa in due sezioni a partire da un indirizzo salvato in un qualche registro registro:
M1: dedicata esclusivamente alsistemaM2: dedicata sia alsistemache all’utente
Fin’ora abbiamo assunto che in M2, in ogni istante, si trova solo la memoria privata del processo attualmente in esecuzione, così da evitare che un processo acceda alla memoria dell’altro.
La memoria privata degli altri processi l’abbiamo localizzata in un HD esterno, che effettua lo swap dell’intero blocco M2 quando si cambia processo. Tutto questo è incredibilmente dispendioso e inefficente.
Quello che vogliamo fare ora è eliminare, o almeno ridurre, le copie da e verso lo swap, tenendo a mente che ci piacerebbe comunque preservare i vantaggi che ha trasferire tutta la M2, ovvero:
- Isolamento tra i processi: ciascun processo può accedere solo alla propria memoria privata
- Semplicità nel collegamento dei programmi: il collegatore può assumere che ogni programma abbia a disposizione l’intera
M2 - Semplicità nel (s)caricamento dei processi: la memoria privata di ogni processo viene ricaricata esattemente nella stessa posizione ogni volta che il processo torna in esecuzione
- Possibilità di condivisione della memoria: se più processi hanno bisogno di condividere memoria tra loro, il sistema può concederlo evitando di sostituire le parti di memoria condivise ogni volta che cambia processo.
Un modo per riassumere la situazione è dire che ogni processo “pensa” di avere la CPU e la M2 tutta per sé, quando in realtà ha una CPU virtuale e una M2 virtuale.
Le vere componenti incarnano ad ogni istante le loro controparti virtuali del processo attualmente in esecuzione.
Quello che facciamo quindi è dividere la memoria in diverse sezioni, ognuna che sarà assegnata ad un processo.
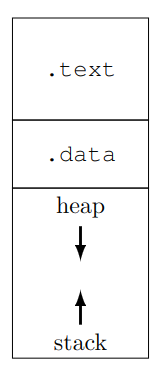
All’interno della M2 virtuale troviamo due sezioni:
- Codice: sezione
.textdell’assembler - Memoria: divisa in:
- sezione
.datadell’assembler stackeheapcomplementari
- sezione
I riferimenti alla memoria tramite “puntatori complementari”, sta a significare che i due puntatori si trovano ai capi opposti della stessa regione di memoria.
Lo stack “sale” in memoria mentre l’heap scende, prendendo spazio finché non collidono, generando un’eccezione di riempimento della memoria.
Per implementare questa divisione è necessario il supporto dell’hardware.
Esistono diversi metodi per implementarlo, noi ne vedremo qualcuno.
2.1. Registri limite inferiore e superiore
Questo metodo suppone di sapere di quanta memoria ha bisogno ogni processo.
Ogni processo dovrà quindi avere sufficente spazio per contenere:
- La sezione
.textcon il codice del programma da eseguire - La sezione
.datadi variabili globali - La sezione dedicata a
stackeheap
Mentre delle prime due sezioni il collegatore conosce sempre la dimensione, per quanto riguarda la terza, essa può essere soggetta a espansione dinamica durante l’esecuzione.
È allora necessario stabilirne una dimensione massima.
Questa scelta può essere effettuata dal programmatore, che informa il sistema di quanto grande debbano essere le porzione dedicate allo stack e allo heap.
In alternativa è anche possibile che il compilatore/collegatore/sistema assumano un valore di default.
Una volta che l’informazione è nota, il sistema può sfruttarla per copiare da e verso lo swap solamente la memoria usata dai processi entranti e uscenti.
Per vietare all’utente l’accesso alle porzioni di M2 di processi diversi, si inseriscono nella CPU due registri, LINF e LSUP, che hanno come compito quello di contenere gli indirizzi dell’inizio e della fine della porzione di memoria virtuale del processo in esecuzione.
Entrambi i registri sono scrivibili solo da livello sistema.
Quando la CPU lavora in modalità utente, deve controllare che gli accessi siano in indirizzi compresi nell’intervallo $\Bigl[$LINF, LSUP$\Bigr)$.
In caso di accessi out-of-bound si genererà invece un’eccezione di protezione 13.
Poiché la maggior parte dei processi non avrà bisogno di tutta la memoria M2, possiamo pensare di caricare più di uno stato alla volta, tenendo in memoria anche lo stato dei processi presenti ma non in esecuzione, così da evitare di ricaricarli quando verranno schedulati.
In pratica rendiamo la memoria M2 come una cache dello swap, con gli stessi problemi da risolvere, ovvero quale processo rimuovere quando la memoria si satura.
Non ci addentriamo in questi problemi adesso, che vedremo più avanti nel corso di Sistemi Operativi, e ci limitiamo a studiare i meccanismi che permettono di realizzare questa cache.
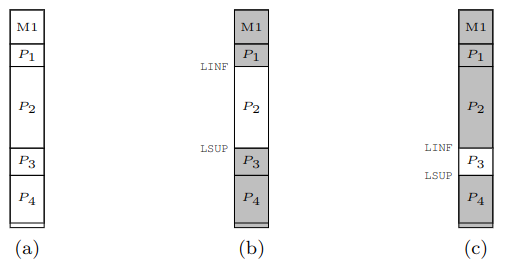
(a) Vengono caricati 4 processi: P1, P2, P3, P4
(b) È in esecuzione P2, non si può accedere alla memoria degli altri processi
(c) cambianto il contenuto di LINF e LSUP cambia la zona di memoria accessibile
Per permettere questa configurazione LINF non contiene più il primo indirizzo di M2, ma bensì quello della prima locazione appartenente al processo in esecuzione.
Entrambi i registri devono quindi avere una posizione nel vettore contesto dei descrittori di processo, ovvero I_LINF e I_LSUP:
- Ogni volta che un processo viene caricato dallo swap il
sistema, riferendosi alla parte diM2da lui occupata, deve inizializzarne i campi:contesto[I_LINF]con l’indirizzo inizialecontesto[I_LSUP]con l’indirizzo finale
- Ogni volta che si cambia processo, il
sistemaaggiorna anche il contenuto diLINFeLSUPcon i valori presi dal descrittore del processo entrante.
Questo permette alla CPU di controllare che ogni processo non effettui accessi out-of-bound rispetto alla memoria assegnata.
Questa soluzione presenta però dei difetti e dei problemi.
Il primo risiede nel capire dove salvare la sezione .text di ogni processo. Infatti, a differenza della memoria unica, dove la sezione .text aveva un indirizzo costante dove essere salvata (LINF), nel caso di memorie multiple il collegatore, si troverà indirizzi di partenza variabili a seconda dello stato del sistema.
Ci sono due modi per risolvere questo problema:
- Compilare tutti i programmi in modo che siano indipendenti dalla posizione.
Questo è possibile e funziona entro certi limiti, poiché gli offset possibili sono esprimibili su massimo
32bit(2GB) - Creare un caricatore rilocante, che riloca il programma al posto del collegatore e, nel momento della carica, lo modifica in modo da adattarlo all’indirizzo di caricamento.
Un secondo problema risiede nel fatto che i processi potrebbero utilizzare indirizzi assoluti per salvare oggetti in memoria.
Nella memoria unica ciò non era un problema, poiché avveniva una sovrascrittura totale ad ogni cambio processo.
Partizionando la memoria però questo diventa rilevante.
Ipotizziamo di avere un processo P1 che salva un indirizzo assoluto nella sua partizione. Questo processo viene poi rimosso e rilocato in un’altra, diversa dalla prima. A questo punto l’indirizzo assoluto che era utilizzato non sarà più disponibile, in quanto si riferisce ad una partizione adesso out-of-bound.
Esiste quindi il vincolo forte:
Se un processo è locato in una determinata partizione della memoria, nel caso di scarica e carica, dovrà sempre essere rilocato nello stessa posizione.
Il terzo problema risiede sulla mancanza di una memoria condivisa, possibile con questo hardware, solamente tra processi in partizioni adiacenti. Per risolvere tutti i problemi cambiamo l’interpetazione degli indirizzi da parte della CPU:
Da adesso in poi, la CPU interpreta ogni indirizzo
xcomeLINF + x. In questo modo ogni indirizzo “assoluto” di un processo, adesso indica semplicemente l’offset daLINFdi quel processo.
Questa implementazione fa in modo che ogni processo si comporti come se avesse una sua memoria dedicata, anche se in realtà non è altro che una memoria virtuale con indirizzi virtuali x, che sono tradotti dalla funzione LINF + x che li traduce in indirizzi fisici.
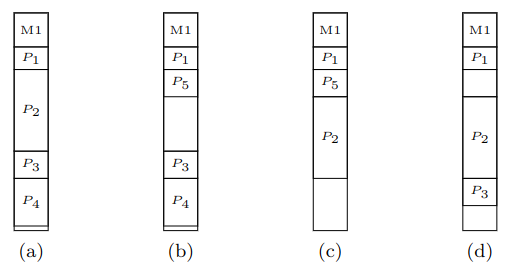
Permane comunque il problema della frammentazione esterna.
Se infatti i processi avessero dimensioni diverse potremmo ottenere casi come quello a destra, dove abbiamo:
- Rimosso
P2e inseritoP5. - Rimosso
P3eP4per inserireP5. - Terminato, e quindi rimosso
P5e inseritoP3.
Adesso non esiste più spazio per P4.
Per ovviare a questo problema i sistemi moderni utilizzano una funzione di traduzione molto più complessa, quella che chiamiamo Paginazione
3. Paginazione
Dato un processo, dividiamo il suo spazio di memoria in quelle che chiamiamo pagine, ognuna di dimensione fissa 4KiB.
Dividiamo inoltre anche la RAM in frame, anch’essi di dimensione fissa 4KiB.
Da adesso ogni pagina può essere inserita in ogni frame.
In questo modo risolvo il problema della frammentazione esterna, poiché i programmi non necessitano più di essere contigui.
Di conseguenza non avremo più i registri LINF e LSUP, che perdono completamente di senso.
Questa scelta impone però dei limiti, uno dei quali è che non posso dare ad un singolo processo uno spazio di memoria minore di 4KiB.
Dobbiamo adesso capire come tenere traccia dei frame che corrispondano alle pagine.
Adottiamo come prima soluzione l’introduzione un’array, che chiamiameremo Tabella di corrispondenza (da ora tabella), alla quale salviamo in ogni posizione, il numero del frame di riferimento.
La posizione x si riferirà alla x-esima pagina del processo.
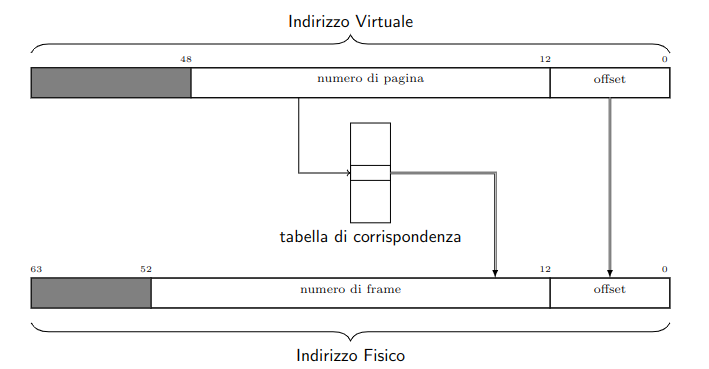
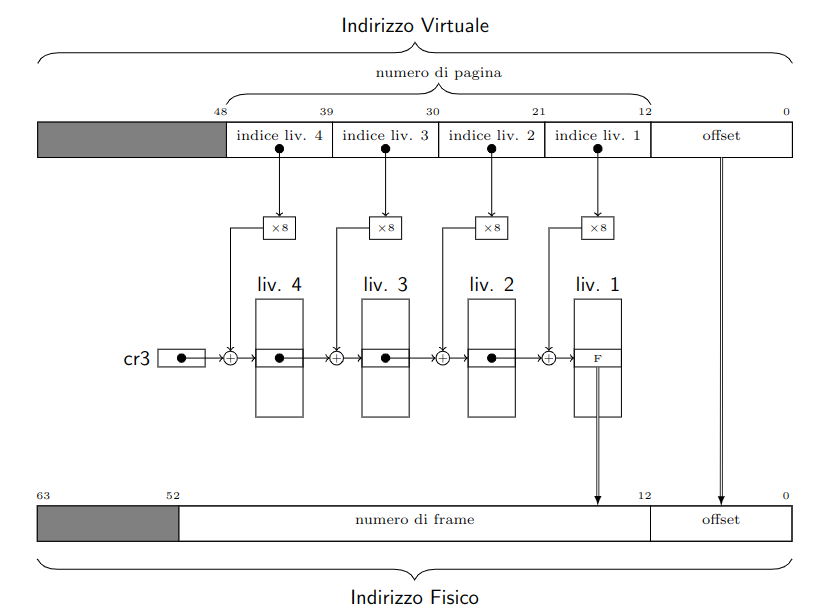
A questo punto scomponiamo ogni indirizzo in due parti {a[p], o} dove:
a[p]: indica il numero dipagina, che viene convertito tramite la tabella nell’indirizzo delframe(f).o: è l’offset rispetto all’inizio dellapagina.
In questo modo, quando accediamo all’indirizzo virtuale x di un processo, andiamo nell’indirizzo reale f + o.
Questa soluzione mantiene l’isolamento, poiché ogni processo avrà una sua tabella, e potrà accedere ai soli ed unici frame contenuti in essa.
Quando questo non accade verrà sollevata l’eccezione di page fault (o segmentation fault nei sistemi Unix).
Inoltre, questa soluzione non richiede di salvare la tabella nel contesto, poiché la ricreeremo ogni volta che il processo verrà caricato.
Siamo inoltre in grado di implementare una memoria condivisa. Per permettere a due o più processi di condividere dei frame, basta inserirli nelle loro tabelle.
Questa soluzione ci permette quindi di decidere:
- Quali processi condividono della memoria
- Quali frame mantenere privati ad un processo e quali rendere condivisibili
3.1. Super MMU
Per implementare le tabelle, possiamo immaginare un nuovo dispositivo, chiamanto Super MMU (Memory Management Unit).
Questa super componente, che nella realtà non esiste nella forma con la quale la descriveremo, si trova tra CPU e cache. Il posizionamento è tale da permetterci di progettare la cache come se la MMU non esistesse.
La super MMU si occupa quindi della traduzione: indirizzi virtuali $\to$ indirizzi fisici.
Vediamo quindi come modificare il kernel per implementare questo nuovo tipo di memoria nel caricamento dei processi.
Affinché tutto funzioni correttamente, diamo per scontato il fatto che la Super MMU sia sempre attiva, anche mentre è in esecuzione il kernel.
Possiamo quindi inserire nella super MMU un nuovo array dedicato proprio a quest’ultimo. L’array conserverà quindi per ogni frame il processo che lo sta occupando. Sottolineiamo che questa soluzione non è quella utilizzata dai processori Intelx86.
Data questa struttura, capiamo quindi cosa succede durante le eccezioni quando vengono sollevate.
Il kernel deve innanzitutto accedere alla riga corrispondente della IDT, ma per accedervi deve passare per la MMU poiché non ne conosce l’indirizzo fisico.
È quindi necessario che la MMU abbia già fatto il cambio di tabella prima che l’eccezione venga sollevata.
Per ovviare a possibili concorrenze che portano solamente ad errori, quello che facciamo è “giocare di anticipo”:
Salveremo in ogni tabella di corrispondenza i frame relativi a
M1.
Nei processori AMD si sfrutta la naturale divisione in due della memroria e si affida la parte superiore al sistema e quello inferiore all’utente. di fatto lo spazio di indirizzamento virtuale nelle due parti (sistema e utente).
Questa soluzione lascia però in chiaro al programma gli indirizzi della memoria di sistema, cosa che noi non vogliamo.
Andiamo quindi a codificare in maniera più “complessa” le righe della tabella di corrispondenza:
-
P: flag di presenza, indica se la traduzione nell’indirizzo esiste o meno, generando un’eccezione di page fault (inUnixsegmentation fault). È sempre0nella prima pagina (per il casonullptr), e neikernelreali è azzerato per diverse prime pagine (per gestire opportunamente il caso di strutture più grandi di4KiB). -
R/W: se settato indica che sono ammesse scritture nella pagina -
U/S: se settato indica che sono ammessi accessi alla pagina da livello utente. È questobitche ci permette di vietare all’utente l’accesso alla memoriaM1. -
PCD: Page Cache Disable, se settato ordina alla cache di non intercettare l’operazione e lasciarla passare inalterata sul bus, similmente a come si comporta per l’I/O -
PWT: Page Write Through, se settato ordina alla cache di usare la politica di write-through per questo accesso (solo se in scrittura). È annullato daPCDse quest’ultimo è settato -
A,D: sono due flag legati all’implementazione dell’area di swap, che vedremo solo da un punto di vista teorico senza implementarla nel nostro calcolatore. LaMMUsettaAdi un’entrata durante l’accesso all’indirizzo interno della corrispondente pagina. Se l’accesso era in scrittura viene settato ancheD.Apuò essere usato quindi per capire quali pagine sono le più utilizzate. È di ausilio alla paginazione su domanda, nella quale vengono caricati in memoria solamente le pagine a cui il processo effettivamente accade, sfruttando il bitPe intercettando il page fault.Dpuò essere usato per capire quali pagine hanno subito modifiche e necessitano di essere salvate ex-novo, e quali invece non sono state modificate e non necessitano il nuovo salvataggio.
3.1.1. Esempio
Supponiamo di avere il seguente programma, nel quale abbiamo un array di char di dimensione 8KiB che chiamiamo buf, e del quale vogliamo saperne la somma.
char buf[0x2000] = { 2, 6, -1, 200, ..., 15, 3, -32, 1};
int main() {
int sum = 0;
for (int i = 0; i < 0x2000; i++)
sum += buf[i];
return sum;
}
Dobbiamo tradurre questo programma in una sequenza di byte da dare al processore.
Per poterlo fare dobbiamo sapere:
- Che CPU utilizziamo (Intelx64)
- Come è gestita la memoria
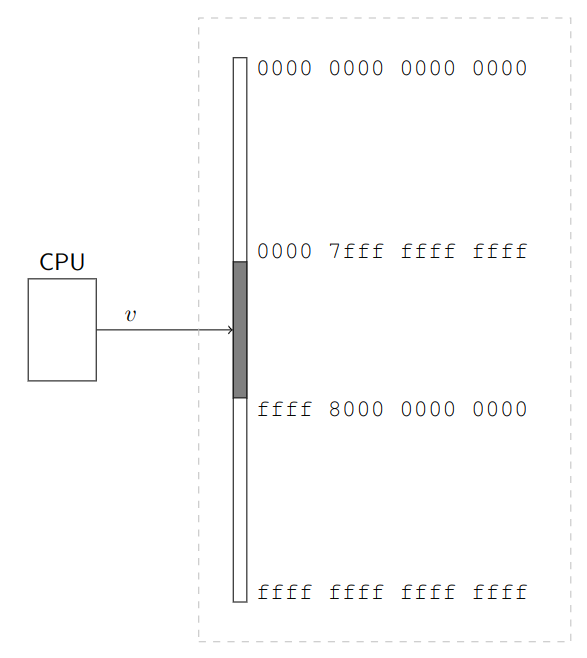
Per questo esempio supponiamo che lo spazio di memoria virtuale sia di soltanto 32KiB.
Ciò implica che gli indirizzi possibili stanno tra 0000 e 7fff.
Se abbiamo che ogni pagina è 4KiB, implica che avremo a disposizione 8 pagine, 2 delle quali (0 e 1) sono però riservate al sistema.
Dobbiamo quindi decidere come contenere il codice:
2:[2000, 2fff]conterrà il codice3-4:[3000, 4fff]conterrà la variabilebuf7: la usiamo come prima pagina dellapila.
Una possibile traduzione è quindi la seguente. In memoria tuttavia andrà la traduzione in linguaggio macchina, che è presente sulla destra
| .text
| .global main
| main:
2000| PUSHq %rbp |55
2001| MOVq %rsp, %rbp |48 89 e5
2004| SUBq $8, %rsp |48 83 ec 08
2008| MOVl $0, -8(%rbp) |c7 45 f8 00 00 00 00
200f| MOVl $0, -4(%rbp) |c7 45 fc 00 00 00 00
| for: |
2016| CMPq $0x2000, -4(%rbp) |48 81 7d fc 00 20 00 00
201e| JGE fine |7d 14
2024| MOVSlq -4(%rbp), %rcx |48 63 4d fc
2028| MOVSbl buf(%rcx), %eax |0f be 81 00 30 00 00
202f| ADDl %eax, -8(%rbp) |01 45 f8
2032| ADDl $1, -4(%rbp) |83 45 fc 01
2036| JMP for |eb e2
| fine: |
203b| MOVl -8(%rbp), %eax |8b 45 f8
203e| POPq %rbp |5d
203f| ret |c3
| |
| .data |
3000| buf: .BYTE 2, 6, -1, 200 |02 06 ff c8
| ... |...
4ffc| .BYTE 15, 3, -32, 1 |0f 03 e0 01
Dopo aver caricato il programma in memoria, inizializziamo i registri:
%rip:0x2000%rsp:0x0000%rbp:0x0000%rcx:0x0000
All’avvio del sistema la CPU tenterà di prelevare l’istruzione contenuta in %rip, ovvero 0x2000, per poi analizzarla per scoprire che l’istruzione è l’equivalente di PUSHq %rbp.
La CPU inizia quindi ad eseguire l’istruzione, decrementando per prima cosa %rsp di 8, assumendo il valore 7ff8.
Una volta terminata l’esecuzione, %rip viene incrementato di 1.
Il programma prosegue, arrivando alla riga 2028, nella quale si accede alla memoria .data del programma.
Da notare che è presente l’indirizzo di buf come immediato esadecimale nel sorgente macchina.
Verrà quindi sommato al contenuto di %rcx (0) e il risultato, interpretato come byte verrà sottoposto a lettura, salvandolo nel registro %eax (propriamente esteso).
Questo è quello che il programmatore si aspetta succeda quando manda in esecuzione il programma.
Quello che succede nella memoria reale però è differente, poiché tra CPU e RAM si trova la Super-MMU che converte gli indirizzi virtuali in indirizzi reali.
Immaginiamo di avere un secondo processo P2, diverso da P1 visto prima:
2000| 55
2001| 48 89 e5
2004| b8 2a 00 00 00 00
200a| 5d
200b| c3
Per caricare un programma, non si intende solamente l’atto di salvare le sue pagine, ma anche quello di predisporre la tabella di corrispondenza.
La Super-MMU avrà questa forma (le informazioni riquadrate indicano l’inaccessibilità da livello utente):
Caricamento del processo P2
P1 |
P2 |
RAM |
|
|---|---|---|---|
| 0 | |||
| 1 | $\boxed{1}$ | $\boxed{\text{sistema}}$ | |
| 2 | 2 | .text2 | |
| 3 | |||
| 4 | |||
| 5 | |||
| 6 | |||
| 7 | 7 | stack2 |
La pagina 0 è lasciata con P = 0 per intercettare le deferenziazioni di nullptr.
P2 non utilizza le pagine 3, 4, 5 e 6.
Caricamento del processo P1
P1 |
P2 |
RAM |
|
|---|---|---|---|
| 0 | |||
| 1 | $\boxed{1}$ | $\boxed{1}$ | $\boxed{\text{sistema}}$ |
| 2 | 3 | 2 | .text2 |
| 3 | 4 | .text1 | |
| 4 | 5 | .data1[0] | |
| 5 | .data1[1] | ||
| 6 | stack1 | ||
| 7 | 6 | 7 | stack2 |
Anche per P1 la pagina 0 è lasciata con P = 0 e la pagina 1 corrisponde allo stesso frame di sistema inaccessibile da livello utente.
P1 non utilizza le pagine 5 e 6
Quando mandiamo in esecuzione P1 tutte le pagine che non sono nel suo codominio diventano inaccessibili.
P1 comincia la sua esecuzione, con la CPU fisica che esegue una lettura all’indirizzo 0x2000 come quella virtuale.
La MMU intercetta l’operazione e scompone l’indirizzo in 0x2|000, ovvero pagina e offset. Consulta quindi l’entrata (2) della tabella restituendo il corrispondente numero di frame (3).
L’accesso viene completato e la CPU fisica riceve PUSHq %rbp esattamente come la virtuale, ed inizia ad eseguirla.
Successivamente decrementa %rsp di 8, cercando quindi di effettuare una scrittura all’indirizzo 0x7ff8.
La MMU intercetta quindi l’operazione e scompone l’indirizzo in 0x7|ff8, consultando l’entrata 7 e trovando il frame 6.
La scrittura viene quindi completata all’indirizzo reale 0x6ff8.
La CPU fisica e virtuale continuano di paripasso eseguendo le medesime istruzioni.
Ipotizziamo quindi che ad un certo punto si generi un’interruzione con cambio di processo e vada in esecuzione P2.
A questo punto P1 si “congela”, mentre il kernel carica i registri di P2 e attiva la sua tabella.
P2 inizia la sua esecuzione, con la CPU (sia fisica che virtuale) che eseguono una lettura all’indirizzo 0x2000.
La MMU infatti intercetta 0x2|000 e corrisponde alla pagina 2 il frame 2.
Viene raccolta quindi l’istruzione PUSH %rbp, che decrementerà %rsp di 8 e andrà a scrivere il contenuto all’indirizzo virtuale contenuto, che stavolta si riferisce a 0x7ff8, salvandola nell’opportuna pila.
Passa ulteriore tempo e viene avviato un nuovo processo P3. Immaginiamo che il kernel, per un motivo o per un altro, decida di rimuovere le pagine di P1 dopo averle copiate nello swap eseguendo un’operazione di swap-out.
Viene quindi caricato in memoria P3, inizializzando la sua *tabella di corrispondenza (sulla destra).
Da notare come non viene rimossa la traduzione per la parte sistema condivisa di P1, che non è ancora terminato, ma semplicemente swappato.
P1 |
P2 |
P3 |
RAM |
|
|---|---|---|---|---|
| 0 | ||||
| 1 | $\boxed{1}$ | $\boxed{1}$ | $\boxed{1}$ | $\boxed{\text{sistema}}$ |
| 2 | 2 | 3 | .text2 | |
| 3 | .text3 | |||
| 4 | stack3 | |||
| 5 | ||||
| 6 | ||||
| 7 | 7 | 4 | stack2 |
Passa altro tempo e P2 termina. Il kernel procederà quindi a liberare tutte le sue pagine.
Ancora dopo il kernel decide di ricaricare P1 per rimetterlo in esecuzione (sulla destra).
Le pagine di P1 non occupano più gli stessi frame che occupavano in precedenza.
Tuttavia anche la tabella di corrispondenza di P1 è adesso diversa, ed in linea con i nuovi frame.
Se infatti va in esecuzione P1, ricordiamo che stava per prelevare MOVSbl buf(%rcx), %eax all’indirizzo 0x2028.
A questo punto la CPU fisica e la virtuale prelevano l’istruzione, quindi sommano il contenuto di %rcx e la costante 0x3000 ottenendo 0x3001 come indirizzo, per poi effettuarvi una lettura.
Ancora una volta la MMU scompone in 0x3|001 per ottenere il frame 5 all’offset 0x001.
L’accesso viene ancora una volta completato, ed entrambe le CPU ricevono lo stesso valore continuando di pari passo completamente intoccate ed estranee al fatto che le pagine di P1 siano state spostate.
P1 |
P2 |
P3 |
RAM |
|
|---|---|---|---|---|
| 0 | ||||
| 1 | $\boxed{1}$ | $\boxed{1}$ | $\boxed{\text{sistema}}$ | |
| 2 | 2 | 3 | .text1 | |
| 3 | 5 | .text3 | ||
| 4 | 6 | stack3 | ||
| 5 | .data[0] | |||
| 6 | .data[1] | |||
| 7 | 7 | 4 | stack1 |
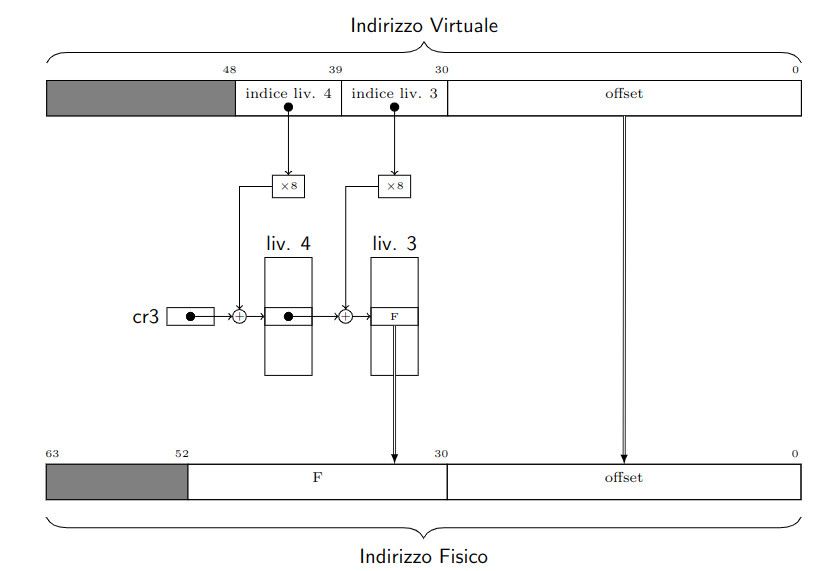
3.2. Trie-MMU
Abbiamo già detto che nella realtà non utilizziamo la Super-MMU. Uno dei motivi è legato alle sue dimensioni se fosse implementata. Proviamo infatti a calcolare la dimensione delle tabelle di corrispondenza usate dalla Super-MMU.
Partiamo dal dire che nei processori Intelx86 a 64bit non tutti gli indirizzi sono utilizzabili.
Normalmente sono utilizzabili “solamente” 48bit, ma esistono anche casi di memoria grande 57bit, ma ne ometteremo l’analisi poiché del tutto analoga alla prima.
Questa scelta è supportata dal fatto che maggiore il numero di bit maggiore è il numero di complicazioni alle quali andiamo incontro. Inoltre, 48bit non sono in realtà per niente pochi, più che sufficenti per i nostri scopi.
Affinché l’indirizzo, che si trova comunque su 64bit sia utilizzabile, lo standard prevede che i bit dal 48 al 63 siano tutti uguali al bit 47, e quindi o tutti 0 o tutti 1.
Gli indirizzi che rispettano questa caratteristica sono detti indirizzi normalizzati.
Questa scelta produce però un “buco” nel quale si trovano tutti quegli indirizzi non utilizzabili.
La memoria virtuale ha quindi una dimensione di almeno $2^{48}$Byte. Conoscendo che ogni pagina è almeno $2^{12}$Byte, la memoria virtuale contiene un massimo di: \({2^{48} \over 2^{12}} = 2^{36} = 64 \text{Gi pagine}\)
La tabella di corrisponendza di ogni processo deve avere una entrata per ognuna di queste pagine. Ogni entrata deve poi contenere almeno i bit P, R/W, U/S, PCD, PWT, A, D e il numero di frame che fornisce i bit da 12 a 57/51 dell’indirizzo fisico, per un totale nel peggiore dei casi di 47bit arrotondabili in 6Byte.
Se poi vogliamo che la dimensione di ogni entrata sia una potenza di 2 saranno necessari almeno 8Byte, che per le 64Gi pagine comporta un totale di 512GiB.
Difficilmente quindi possiamo pensare che la Super-MMU esista davvero. Per affrontare il problema notiamo infatti che la stragrande maggioranza dei programmi ha bisogno solo di una piccola frazione dei $2^{48}$Byte disponibili nella memoria virtuale, ed è solo di quella porzione che vorremmo contenere le informazioni.
È quindi stata introdotta la Trie-MMU, una MMU del tutto identica alla Super-MMU, tranne che per il formato della tabella di corrispondenza e, sperabilmente, per le dimensioni.
Come la Super, la Trie possiede:
- Memoria interna dove salvare le tabelle
- Registro
cr3che serve ad individuare la tabella di corrispondenza attiva ad ogni istante.
La struttura dati da Trie-MMU è un bitwise trie, che è una variante di trie:
I trie sono strutture dati ad albero che permettono di mappare chiavi di tipo stringa in valori, in modo che i caratteri successivi dela chiave guidino la ricerca all’interno dell’albero.
Consideriamo ad esempio il trie mostrato sulla destra.
L’albero memorizza le associazioni:
trip$\to$viaggiotree$\to$alberohill$\to$collinahot$\to$caldohouse$\to$casa
Si noti inoltre che:
- Gli archi dell’albero sono contrassegnati con i caratteri delle chiavi
- Il valore associato ad ogni chiave si trova nella foglia che si raggiunge partendo dalla radice e seguendo il percorso indicato dalla chiave.
(in trie generici una chiave si può trovare anche nei nodi intermedi, tuttavia nel nostro caso le chiavi hanno tutte la stessa dimensione)
Un modo per implementare un trie è di avere in ogni nodo un array di 128 entrate, ciascuna delle quali contenga il puntatore al prossimo nodo da visitare in base al codice ASCII del prossimo carattere della chiave.
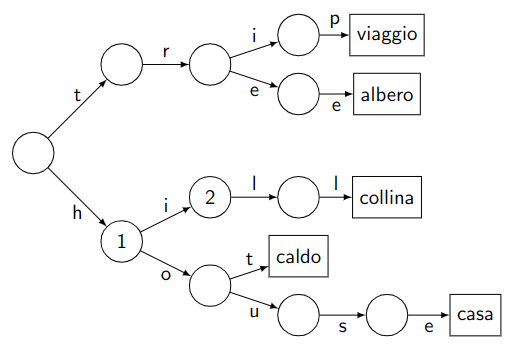
Ogni nodo si trova sul percorso di tutte le chiavi che iniziano con lo stesso prefisso
Per esempio il nodo marcato con $2$, si trova nel percorso delle chiavi che iniziano con hi.
Una ricerca della chiave history, arriverebbe al nodo $2$ per poi trovare un puntatore nullo associato al carattere s, e la ricerca si concluderebbe con un fallimento.
L’inserimento di una nuova associazione chiave/valore nel trie comporta una visita dell’albero come in una ricerca, ma creando gli eventuali nodi intermedi mancanti, fino alla foglia.
Nel nostro caso la chiave è il numero di pagina, e il valore che vi vogliamo associare è il corrispondente numero di frame.
Per questo scopo possiamo utilizzare un bitwise trie, che funziona come i trie ma utilizza gruppi di bit piuttosto dei caratteri.
In particolare il numero di pagina è composto da 36bit, raggrupabili in 4 gruppi di 9bit.
Ogni nodo del bitwise trie conterrà dunque una tabella di $2^9 = 512$ entrate con puntatori al nodo successivo. (eventualmente nulli)
Inoltre, le foglie stesse possono essere tabelle indicizzate dall’ultimo gruppo di 9bit della chiave.
In questo caso le entrate delle tabelle foglie conterranno il numero di frame associato al numero di pagina, ottenendo la struttura sulla destra.
Questo procedimento viene chiamato table-walk
Per convenzione ogni livello dell’albero viene numerato da 4 a 1 (livello delle foglie), in modo di poter parlare di tabelle di livello x.
In questa struttura è molto comodo utilizzare la rappresentazione in base 8, dove raggruppiamo i 9bit in 3 cifre.
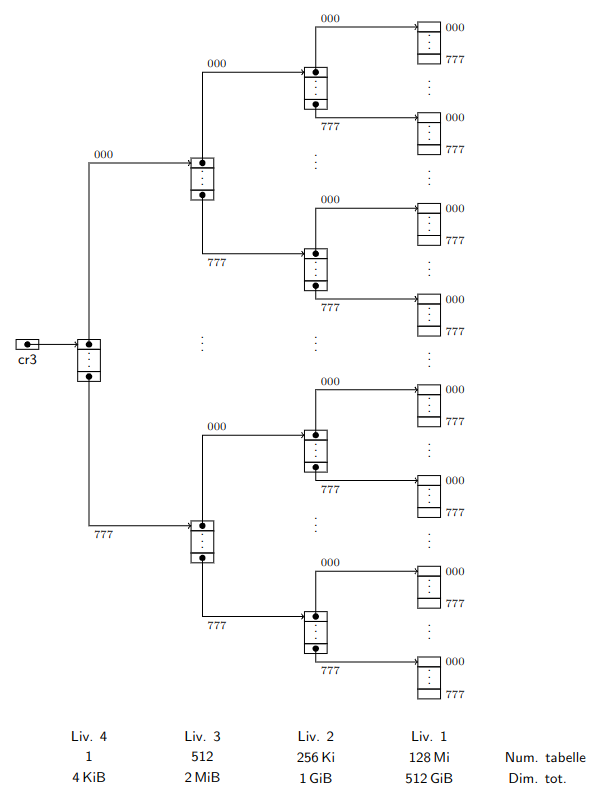
Ciascun nodo dell’albero è una tabella di 512 entrate di 8Byte ciascuna, per un totale di 4094Byte = 4KiB ciascuna.
I valori in basso all’immagine fanno riferimento al caso in cui tutte le possibilli tabelle fossero piene.
Notiamo immediatamente che le dimensioni totali del livello 1 sono le medesime della Super-MMU.
Tuttavia, con la Trie-MMU possiamo non istanziare tutte le entrate immediatamente.
Per fare ciò poniamo semplicemente P = 0 nelle righe tabelle di livello 2, 3 o 4 che si riferiscono a indirizzi mai utilizzati.
Se ad esempio un processo non usa nessun indirizzo il cui numero di pagina inizi con $(777)8$, il _trie di questo processo non ha bisogno di tutto il sottoalbero di quel nodo, ed eviterà quindi di allocarlo.
Ipotizziamo che il nostro trie si trovi a dover tradurre l’indirizzo virtuale v = (000 777 000 777 1234)_8, che ha quindi come numero di pagina: (000 777 000 777)_8.
I primi 9bit sono $(000)_8$, perciò verrà utilizzata l’entrata di indice 0 del livello 4, recuperandone il contenuto.
Questo contenuto rappresenta l’indirizzo dove si trova la tabella da interpretare come di livello 3.
Si passa quindi a questa per valutare i successivi 9bit $(777)8$ per sapere dove si trova la tabella di livello 2 da consultare.
La _trie utilizzarà l’ultima entrata e passerà alla seconda tabella di livello 2 dall’alto in figura.
Qui verranno utilizzati i bit $(000)_8$ verso la terza tabella di livello 1 dall’alto, trovando infine la traduzione che stava cercando nell’entrata $(777)_8$ di questa tabella.
Questa struttura ci permette di non dovere allocare più volte in uno stesso trie una zona di memoria condivisa.
Per condividere la memoria sarà sufficente far puntare allo stesso nodo i trie di due processi distinti, ovvero inserire nella tabella di livello 4 lo stesso indirizzo allo stesso offset, così da puntare alla stessa tabella di livello 3.
Inoltre possiamo adesso scegliere dove, virtualmente, ogni processo vede la memoria condivisa, oltre che a poter decidere, manipolando i bit R/W di questi nuovi percorsi, chi può scrivere nella memoria condivisa e chi non può.
3.2.1. Formato delle tabelle
Il formato delle tabelle di livello 1 è il seguente:
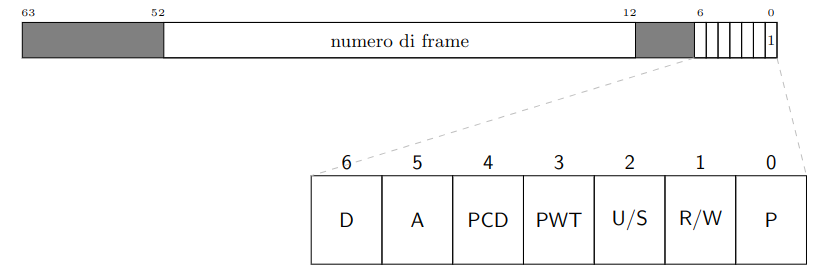
Questo formato rispecchia quello adottato nelle architetture Intel/AMD a 64bit.
Il formato contiene le informazioni che avevamo introdotto con la Super-MMU.
Da adesso chiameremo queste entrate descrittori di pagina virtuale o descrittori di livello 1.
Per quanto riguarda PCT e PWD hanno senso solamente in questo livello.
Per quanto riguarda A e D:
A: può invece essere utilizzato per capire qualipaginesono più usate o sono state utilizzate più recentemente. Viene settato daMMUse quell’entrata è stata utilizzata.D: ha senso solo al livello 1. Ogni volta che il sistema carica le pagine di un processo in memoria, dovrebbe porloD = 0in tutte le entrate della tabella di corrispondenza. Al momento di eseguire uno swap-out del processo, il sistema può evitare di salvare tutte le pagine del processo nel dispositivo di swap, esaminando solo quelle pagine dove adessoD = 1a seguito di una scrittura.
I descrittori di livello 2, 3 e 4 hanno invece la seguente forma:
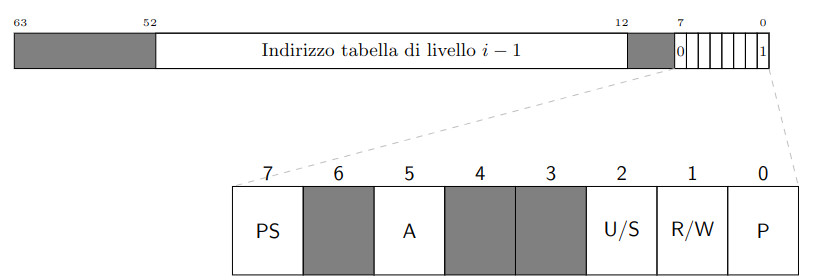
Ciascuna contiene 512 entrate.
Da notare i padding tra i bit 0 e 11, dovuti all’allineamento a multipli di 4KiB.
Viene introdotto un nuovo bit, il PS (Page Size), che per ogni livello intermedio indica il punto di arresto della traduzione.
In questo viene comunicato che il frame ha la dimensione della regione da lui identificata.
Questi descrittori, seppur simili, sono diversi da quelli di livello 1:
- Questi descrivono tabelle
- Gli altri descrivono
pagine
Il processo di traduzione si articola in questo modo:
Durante la traduzione la Trie-MMU esegue anche altri compiti aggiuntivi, che le permettono di avere un comportamento analogo alla Super-MMU:
- Controlla tutti i bit
R/W: permette le operazioni di scrittura solo se tutti e4bitlungo il percorso la permettono - Controlla tutti i bit
U/S: permette le operazioni di accesso solo se tutti e4bitlungo il percorso la permettono - Passa al controllore cache le informazioni dei bit
PWDePCDdel descrittore di livello 1 - Pone tutti e
4bitA = 1incontrati (se non lo erano già) - In caso di scrittura, pone
D = 1nel descrittore id livello 1.
Se uno qualsiasi dei bit P incontrati durante la traduzione vale 0, la Trie-MMU smette di tradurre e solleva un’eccezione di page fault.
Ciascuna delle tabelle di corrispondenza deve essere sostituita quindi con uno di questi trie.
3.2.2. Regioni e Sottoregioni
Un altro modo per pensare alle operazioni svolte dalla Trie-MMU è di ragionare in termini di regioni naturali. (intervalli di indirizzi con dimensione pari ad una potenza di 2 e allineate naturalmente)
Possiamo quindi identificare ciascuna tabella del trie specificando la sequenza di bit della chiave che porta dalla radice alla tabella in questione.
Per esempio, la terza tabella di livello 2 dall’alto nell’immagine sopra è identificata dalla sequenza di 18bit (777 000)_8.
La traduzione di tutti gli indirizzi virtuali che iniziano con questo prefisso deve passare da questa tabella.
Questa tabella, dunque, è “responsabile” della traduzione dell’intera regione naturale, grande 248−18 = 230 = 1GiB, il cui numero di regione è appunto (777 000)_8.
Aggiungendo ulteriori 9bit possiamo identificare anche ogni singola entrata della tabella.
Per esempio, i 27bit (777 000 777)_8 identificano
- La terza tabella di livello 1 dal basso (
t), - L’ultima entrata della seconda tabella di livello 2 dal basso (
e).
Di nuovo, la traduzione di tutti gli indirizzi virtuali che iniziano con (777 000 777)_8 deve passare dall’entrata e e poi da una dalle entrate della tabella t.
Tutti questi indirizzi virtuali appartengono alla stessa regione naturale grande 248−27 = 221 = 2MiB, il cui numero di regione è (777 000 777)_8.
Possiamo perciò dire che l’entrata e, oppure l’intera tabella t, sono responsabili della traduzione in questa regione.
In generale, diremo che:
Ogni entrata di una tabella di livello $i$, con $1 \le i \le 4$, sarà responsabile della traduzione di una regione naturale di livello $i -1$.
Ogni tabella di livello $i$ sarà responsabile nella sua interezza della traduzione di una regione naturale dello stesso livello $i$.
In questa definizione incontriamo le regioni di livello 0 non sono altro che le pagine, ognuna di grandezza 12Byte.
In generale una regione di livello $j$, con $0\le j\le 4$, è grande $29j + 12$byte.
Perciò ogni entrata di una tabella di livello 1 è responsabile della traduzione di una ben precisa pagina, mentre una intera tabella di livello 1, nel suo complesso, è responsabile della traduzione di una ben precisa regione di livello 1, grande 29×1+12B = 2 MiB, la stessa regione di cui è responsabile l’entrata (in una tabella di livello 2) che punta alla tabella nel trie, e così via.
3.3. MMU
Eliminiamo ora le semplificazioni fatte fin’ora e studiamo la MMU che si trova nei sistemi Intel/AMD a 64bit.
La Trie-MMU aveva una memoria interna per memorizzare le tabelle dei vari livelli, mentre nella MMU non funziona così, ma le tabelle devono essere memorizzate nella memoria fisica.
Infatti anche le tabelle sono allineate a 4KiB, quindi perfettamente inseribili nei frame di M2.
Il registro %cr3 della MMU contiene semplicemente il numero di frame della tabella radice del trie corrente.
La MMU si limita quindi a realizzare in hardware il table-walk, nella RAM. Questo rende la MMU realizzabile in pratica, ma genera nuovi problemi da affrontare:
- Dove trovare lo spazio per le tabelle nella memoria fisica
- Rendere efficente il meccanismo di table-walk, che richiede tanti accessi in memoria per singolo accesso iniziato dalla CPU.
3.3.1. Traduzioni Identità
Preoccupiamoci intanto di dove salvare i trie.
Quando una tabella, a questo punto in un frame, si riferisce alla tabella successiva in un’altro frame, conserva il suo indirizzo fisico, poiché gli indirizzi virtuali esistono solo per la CPU prima dell’attraversamento della MMU.
Questo genera però dei problemi, in quanto il contenuto in %cr3 è appunto un’indirizzo fisico, e la lettura provoca una traduzione non significativa.
MOV %cr3, %rax ; Copio l'indirizzo fisico in %rax
MOV (%rax), %rbx ; Copio il contenuto dell'indirizzo fisico %rax
;! ERRORE: la MMU tradurrà l'indirizzo fisico interpretandolo come virtuale
Per ovviare a questo problema di traduzione, il kernel fa in modo di utilizzare traduzioni identità.
Nello spazio di memoria virtuale di un processo, diviso in due metà come abbiamo visto prima, riserviamo la parte alta al sistema, mentre la parte bassa all’utente.
Nella parte sistema inizializziamo quindi le traduzioni identità, che mappano un indirizzo virtuale x nell’indirizzo fisico x, affinché gli indirizzi virtuali e fisici combacino numericamente.
Questo permette alle esecuzioni in modalità sistema di poter accedere a tutta la RAM, “bypassando” gli indirizzi virtuali, accedendo praticamente agli indirizzi fisici.
L’indirizzo contenuto in cr3 si riferirà quindi a questa porzione, in modo che il codice visto prima, quando eseguito dalla CPU, funzioni correttamente.
La modifica al bootstrap di un processo per creare questa opzione è in realtà abbastanza banale, in quanto all’accensione la MMU è disattivata, e la CPU utilizza direttamente gli indirizzi fisici.
In questo modo possiamo quindi anche inserire gli indirizzi di APIC e I/O nella parte sistema, cossicché la CPU possa accedervi liberamente come se la MMU fosse disattivata.
3.3.2. TLB
Introducendo la MMU, per ogni accesso in memoria da parte del software, accediamo ad un minimo di 4 tabelle per recuperare l’indirizzo fisico al quale successivamente accedere.
Se consideriamo che la MMU deve aggiornare i bit A e D, possiamo arrivare a 8 accessi o persino 12 nei casi peggiori.
Ciò riguarda anche gli accessi in cache.
Tutto questo processo non fa altro che rallentare la nostra CPU.
Inseriamo quindi una cache alla MMU chiamata TLB (Translation Lookaside Buffer).
Lo scopo della TLB è di ricordare le traduzioni utilizzate più recentemente, dove per traduzioni intendiamo ciò che è contenuto nei descrittori di livello 1, insieme alle informazioni accessorie.
Quando MMU accede alla memoria tramite un’indirizzo virtuale, può quindi salvare nel TLB la sua traduzione.
Agli accessi successivi si controllerà prima se in TLB è già presente il descrittore che si sta cercando, altrimenti ci si comporta come descritto fin’ora, tramite table-walk.
La TLB, per struttura, è poco accessibile da software, tuttavia ne è permesso lo svuotamento.
Questo processo è obbligatorio nei cambi di contesto, in quanto le traduzioni di P1 non hanno senso per P2.
Nei processori Intel questo svuotamento avviene in automatico quando viene scritto %cr3, anche se viene cambiato in se stesso. (MOV %cr3, %cr3)
Un esempio di TLB a due vie può essere il seguente:
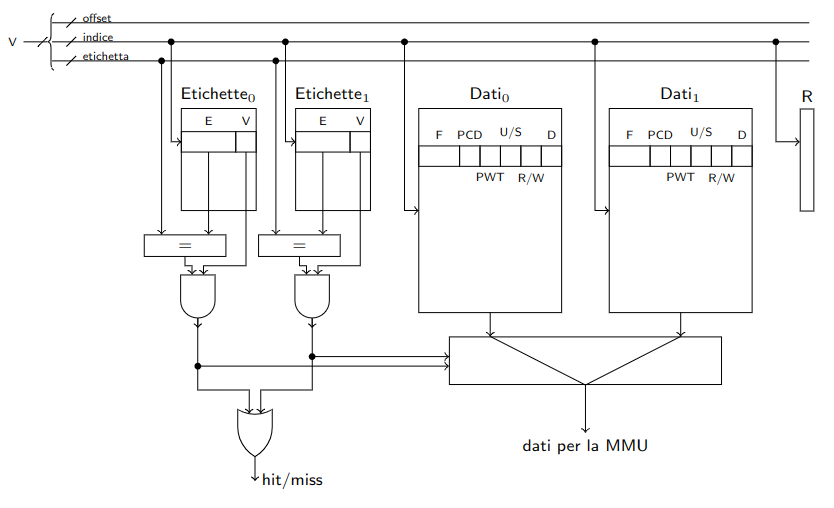
Figura 1: V rappresenta l’indirizzo virtuale, F rappresenta l’indirizzo fisico.
Per ottimizzare lo spazio, all’interno dei dati nel TBL non sono salvate alcune informazioni:
P: se l’indirizzo si trova in cache vuol dire che era presenteA: se l’indirizzo si trova in cache vuol dire che vi abbiamo effettuato un accessoU/S: salvato un solo bit ottenuto dall’ANDdei quattro bit incontrati nel table-walkR/W: salvato un solo bit ottenuto dall’ANDdei quattro bit incontrati nel table-walk
È importante focalizzarci su due punti riguardanti il bit A e il bit D.
Il bit A viene settato durante il table-walk, qiventa quindi un problema quindi azzerarlo via software. Infatti, se l’indirizzo è presente nel TLB, non viene rieseguito fatto l’accesso al trie.
In questo caso la soluzione è quella di azzerare le righe corrispondenti nel TLB prima di affettuare gli accessi che modificano A.
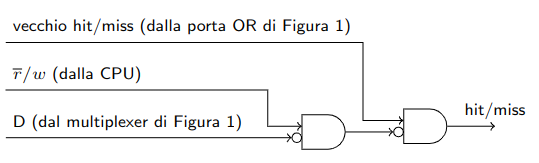
Il bit D deve essere settato solo quando effetuiamo un’accesso in scrittura.
Nel caso in cui effettuiamo un accesso in lettura tramite table-walk (che non setta D) a un indirizzo, lo salveremo nel TLB.
A questo punto se effettuiamo un accesso in scrittura allo stesso indirizzo, dovremmo settare D nel trie, ma non vi accediamo mai in quanto si trova nella TLB.
Settare quello nella TLB è completamente inefficace per il software poiché non solo è per lui inaccessibile, ma il contenuto stesso del TLB è volatile, in quanto è una cache, quindi ogni riga può essere soggetta a sovrascritture.
È necessario quindi effettuare un table-walk per sovrascrivere il bit D.
Il modo per farlo è non consultare la TLB negli accessi in scrittura di frame che avevano D = 0. apportando questa modifica alla figura 1:
3.4. Pagine di grandi dimensioni
Quando effettuiamo una traduzione, non possiamo saperne a priori le dimensioni.
Infatti questa informazione sarà accessibile solo alla quando arriveremo al livello 1, guardando il bit PS.
Perciò dobbiamo trovare una soluzione per quanto riguarda il salvataggio di indirizzi più grandi nel TLB.
Nei primi processori, gli accessi a pagine più grandi dei 4KiB occupavano più righe del TLB.
Ad esempio pagine da 2MB ne occupavano ben 512 righe.
Nel caso di pagine da 1GiB la traduzione è la seguente:
La soluzione moderna a questo problema è quella di avere un TLB per ogni dimensione.
La traduzione verrà quindi cercata in parallelo in ciascuno dei TLB, come nel caso di TLB a più vie, e verrà selezionata solamente quella desiderata.
I TLB aggiuntivi permettono di alleggerire il carico sul TLB principale, velocizandone le operazioni.
4. Funzioni di Supporto per la Paginazione
Nella libreria libce.h sono definite una serie di funzioni e tipi che ci permettono di gestire la paginazione.
Lo standard C++non suporta la conversione tra puntatore e tipo nativo, anche se è proprio ciò che desideriamo fare quando gestiamo il kernel.
Nella libreria definiamo i tipi numerici paddr (physical-address) e vaddr (virtual-address).
Entrambi sono puramente typedef di natq, ma facciamo la distinzione per puro scopo di lettura e utilizzo.
Quando vogliamo convertirlo in un puntatore a type utilizziamo il cast:
type* punV = ptr_cast<type>(v);
type punP = int_cast<type>(p);
Lo standard ci permette di fare questa cosa affinché il type sia sufficente grande da contenere la variabile.
Vediamo quindi le funzioni.
4.1. Calcoli con gli Indirizzi
La prima è la funzione norm(), che serve a normalizzare un indirizzo virtuale (rende i 16bit più significativi tutti uguali al bit 47).
// vm.h
static inline constexpr vaddr norm(vaddr a) {
return (a & VADDR_MSBIT) ? // se il bit più sign. è 1
(a | ~VADDR_MASK) : // setta tutti bit alti
(a & VADDR_MASK); // altrimenti resettali
}
La funzione base(v, liv) ci fornisce la base della regione di livello liv in cui cade un indirizzo v.
La funzione limit(e, liv) ci fornisce invece la base della prima regione di livello liv che si trova a destra di un intervallo [b, e).
// vm.h
static inline constexpr vaddr base(vaddr v, int liv) {
natq mask = dim_region(liv) - 1;
return v & ~mask;
}
// ...
static inline constexpr vaddr limit(vaddr v, int liv) {
natq dr = dim_region(liv);
natq mask = dr - 1;
return (v + dr - 1) & ~mask;
}
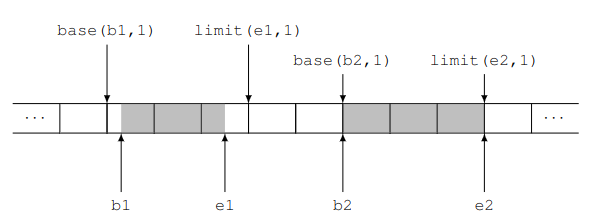
Esempio per intervalli di indirizzi [b1, e1) e [b2, e2).
La funzione dim_region(liv) restituisce invece la dimensione in Byte di una regione di livello liv.
Per regione di livello $i$ si intende l’intervallo di indirizzi coperti da una singola entrata di una tabella di livello $i+1$.
static inline constexpr natq dim_region(int liv) {
natq v = 1ULL << (liv * 9 + 12);
return v;
}
4.2. Manipolare le singole entrate
Per rappresentare un’entrata di una qualsiasi tabella di qualunque livello, è introdotto il tipo tab_entry (anch’essa una typedef di natl).
Il file vm.h contiene anche la definizione di un po’ di costanti, una per ogni bit del byte di accesso delle entrate.
Queste possono essere usate come maschere per estrarre, settare o resettare i vari bit.
Ad esempio:
tab_entry e;
if(e & BIT_P) // Controllo del bit P
e |= BIT_W; // Settare il bit W
e &= ~BIT_A; // Resettare il bit A
Per estrarre l’indirizzo fisico contenuto nell’entrata di e è introdotta la funzione extr_IND_FISICO(tab_entry e).
Allo stesso modo esiste la funzione set_IND_FISICO(tab_entry& e, paddr p) che setta il campo dell’entrata e con il numero di frame dell’indirizzo fisico p, senza modificare A.
static inline constexpr paddr extr_IND_FISICO(tab_entry e) {
return e & ADDR_MASK;
}
static inline void set_IND_FISICO(tab_entry& e, paddr f) {
e &= ~ADDR_MASK;
e |= f & ADDR_MASK;
}
4.3. Lavorare su singole tabelle
Per allocare una tabella nella memoria si utilizza la funzione alloca_tab(), mentre rilascia_tab() la dealloca:
/// Array dei descrittori di frame
des_frame vdf[N_FRAME];
// ...
paddr alloca_tab() {
paddr f = alloca_frame();
if (f) {
memset(voidptr_cast(f), 0, DIM_PAGINA);
vdf[f / DIM_PAGINA].nvalide = 0;
}
return f;
}
void rilascia_tab(paddr f) {
if (int n = get_ref(f)) {
fpanic("tentativo di deallocare la tabella %lx con %d entrate valide", f, n);
}
rilascia_frame(f);
}
La funzione i_tab(v, liv) estrae dall’indirizzo virtuale v l’indice che la MMU usa per consultare le tabelle di livello liv.
static inline constexpr int i_tab(vaddr v, int liv) {
int shift = 12 + (liv - 1) * 9;
natq mask = 0x1ffULL << shift;
return (v & mask) >> shift;
}
La funzione get_entry(t, i), restituisce un riferimento all’entrata i-esima della tabella all’indirizzo fisico t.
static inline tab_entry& get_entry(paddr tab, natl i) {
tab_entry *pd = ptr_cast<tab_entry>(tab);
return pd[i];
}
Se si vuole sovrascrivere completamente un’entrata di una tabella con un nuovo valore si utilizza la funzione set_entry(tab, j, se), che ha il vantaggio di gestire automaticamente l’eventuale contatore di intrate valide della tabella tab.
void set_entry(paddr tab, natl j, tab_entry se) {
tab_entry& de = get_entry(tab, j);
// il contatore deve essere aggiustato se il bit P cambia valore
if ((se & BIT_P) && !(de & BIT_P)) {
inc_ref(tab);
} else if (!(se & BIT_P) && (de & BIT_P)) {
dec_ref(tab);
}
de = se;
}
4.4. Interagire con l’Hardware
Sono presenti delle funzioni scritte in assembler che permettono di leggere i registri cr3 e cr2, e scrivere in cr3.
Le funzioni sono readCR3(), readCR2() e loadCR3(dir).
In particolare si utilizza loadCR3(dir), dove dir è il paddr della tabella radice, va usata per attivare un nuovo albero di traduzione.
Il registro cr2 contiene l’ultimo vaddr che ha causato un’eccezione di page fault, e non è scrivibile da software.
Esiste anche la funzione invalida_entrata_TLB(v) che serve a invalidare la traduzione associata al vaddr v nel TLB nel caso ne stesse conservando una copia.
Per invalidare l’intero TLB si può utilizzare invalida_TLB(), che nei processori Intel è equivalente a loadCR3(read(CR3)).
4.5. Lavorare con interi TRIE
Sono introdotte anche delle funzioni utili quando si lavora con interi trie, che utilizzano internamente quelle enunciate sopra.
È introdotto innanzitutto l’iteratore tab_iter, che permette di visitare tutte le entrate dell’albero di traduzione coinvolte, a tutti i livelli, nella traduzione di tutti gli indirizzi di un dato intervallo.
La visita è del tipo depth-first, e può essere eseguita sia anticipata che posticipata. Tutte le entrate sono visitate una sola volta e le entrate foglia sono visitate rispettando l’ordine crescente degli indirizzi virtuali.
Va costruito specificando l’indirizzo fisico della tabella radice dell’albero, la base dell’intervallo e la sua lunghezza.
Quando viene costruito si trova sull’entrata della tabella radice relativa all’indirizzo base, e ad ogni istante, tranne quando la visita è terminata, l’iteratore si troverà su una qualche entrata dell’albero.
Per spostare l’iteratore sulla prossima entrata si utilizza il metodo next(), e per ottenere un riferimento all’entrata fisica, l’indirizzo fisico della tabella o al livello della tabella si utilizzano rispettivamente i metodi get_e(), get_tab() e get_l().
Se la visita è termitata l’operatore di conversione a bool restituisce false.
È quindi possibile stampare tutto il percorso di traduzione nel seguente modo:
// Albero di radice tab4
// Intervallo di vaddr [v, v+1)
for(tab_iter it(tab4, v); it; it.next()) {
printf("tab %x, liv %d, entry %x\n",
it.get_tab(),
it.get_l(),
it.get_e());
}
it si troverà in ordine su tab4, tab3, tab2 e infine su tab1.
Successivamente la visita sarà terminata e la conversione a bool resituirà false.
// Albero di radice cr3
// Pagine v e v+DIM_PAGINA
// (suppenendo v non sia né l'ultima né adiacente al buco)
for(tab_iter it(tab4, v, 2*DIM_PAGINA); it; it.next()) {
printf("tab %6lx, liv %d, entry %6lx\n",
it.get_tab(),
it.get_l(),
it.get_e());
}
In questo caso le prime 4 iterazioni sono le stesse che a sinistra.
Tuttavia a questo punto itererà per tutta la tab1.
Quando finirà tornerà a tab2 entrando nel secondo indirizzo per rientrare al primo livello.
Quelle implementate sopra sono visite in ordine anticipato, utili per la creazione di trie.
Per implementare invece una visita posticipata:
tab_iter it(tab4, v);
for(it.post(); it; it.next_post()) {
printf("tab %6lx, liv %d, entry %6lx\n",
it.get_tab(),
it.get_l(),
it.get_e());
}
In questo caso la visita avverrà in ordine tab1, tab2, tab3 e infine tab4.
È utile per la distruzione di trie.
Se invece vogliamo esaminare il percorso di traduzione di un singolo indirizzo, conviene usare il seguente codice:
tab_iter it(tab4, v);
while(it.down()) {
// ...
}
La differenza tra it.next() e it.down() è che la tab_iter::down() ad ogni passo scende di un livello. Arrivata quindi alla tabella di livello 1, considera la visita terminata. La tab_iter::next() invece si può muovere anche tra entrate di una stessa tabella. Arrivata quindi alla tabella di livello 1, se chiamata passa semplicemente all’entrata successiva. Termina solamente quando si raggiunge la dimensione massima specificata (o quella di default).
Proseguendo con altre funzioni troviamo la funzione trasforma(root, v) che converte l’indirizzo virtuale v nel corrispondendte indirizzo fisico in base al trie con radice root.
4.6. Funzioni map e unmap
Sono in molti casi il modo più semplice di manipolare i trie per creare o eliminare traduzioni.
La funzione map() riceve:
- L’indirizzo fisico
tabdella tabella radice - Gli estremi di un intervallo
[begin, end)di indirizzi virtuali - Parametro template
getpaddrche si deve comportare come una funzione che traduce davaddrapaddr.
La funzione map creerà quindi nell’albero di radice tab le traduzioni v$\to$getpaddr(v) per tutti gli indirizzi di pagina v nell’intervallo [begin, end).
La funzione riceve anche un parametro flags con il quale si può specificare il valore desiderato per i flag per tutte le traduzioni generate.
Nel caso venga passato un intervallo già occupato, la map() genererà un errore.
Vediamo un esempio per creare delle traduzioni identità nell’intervallo [0x1000, 0x800000), in modo che siano accessibili in scrittura da livello sistema:
paddr identity_map(vaddr v) {
return v;
}
void foo() {
// ...
map(tab, 0x1000, 0x800000, BIT_RW, &identity_map);
// ...
}
La funzione creerà il mapping:
0x1000$\to$identity_map(0x1000)$\to$0x10000x2000$\to$identity_map(0x2000)$\to$0x2000- …
0x7ff000$\to$identity_map(0x7ff000)$\to$0x7ff000
Se invece vogliamo mappare gli stessi indirizzi su nei nuovi frame di M2, basta sostituire identity_map:
paddr my_alloc_frame(vaddr v) {
return alloca_frame();
}
void foo() {
// ...
map(tab, 0x1000, 0x800000, BIT_RW, &my_alloc_frame);
// ...
}
In questo caso sono molto utili le espressioni lambda al posto dei puntatori a funzione. Le espressioni lambda hanno la seguente sintassi:
// Se vogliamo che la lambda possa accedere e modificare
// le variabili nello scope della funzione, è sufficente
// scrivere [&] invece di [].
[/* & */](argomenti) -> returnType {
/*
* corpo funzione
*/
return something;
}
// `-> returnType` si può omettere
Un’altra possibilità è quella di usare oggetti istanza di classi/strutture che ridefiniscono operator().
Questo è utile quando per creare correttamente le traduzioni non è sufficente conoscere l’indirizzo virtuale, ma abbiamo necessità di avere altre informazioni.
Un esempio nel nostro nucleo è data dalla funzione carica_modulo(), che deve creare un mapping per ogni segmento di un file ELF.
Vediamo però un esempio più semplice: creare un mapping tra lo stesso intervallo di prima e degli indirizzi fisici arbitrari contenuti in un array paddr a[]:
class my_addrs{
paddr *pa;
int i;
public:
my_addrs(paddr *pa_) : pa(pa_), i(0) {}
paddr operator()(vaddr v) {
return pa[i++];
}
}
void foo{
paddr a[] = {...};
my_addrs m(a);
map(tab, 0x1000, 0x800000, BIT_RW, m);
}
La funzione unmap() esegue l’operazione inversa di map(): distrugge tutte le traduzioni in un dato intervallo di indirizzi virtuali.
La funzione si occupa di deallocare anche le tabelle vuote dopo aver eliminato le tradizioni, utilizzando la funzione rilascia_tab().
La funzione riceve un parametro template putaddr che l’utente può usare per decidere cosa fare di ogni indirizzo fisico che prima era mappato da qualche indirizzo virtuale.
Per esempio, per ditruggere il mapping creato tramite identity_map() non è necessario fare niente, e putaddr può essere l’equivalente di una NOP:
void do_nothing(vaddr v, paddr p, int lvl) {
return;
}
void foo() {
// ...
unmap(tab, 0x1000, 0x800000, &donothing);
// ...
}
Invece, per disfare i mapping creati tramite my_alloc_frame() è necessario che la funzione passata chiami rilascia_frame() sui vari indirizzi fisici:
void my_rel_frame(vaddr v, paddr p, int lvl) {
rilascia_frame(p);
}
void foo() {
//...
unmap(tab, 0x1000, 0x800000, &my_rel_frame);
//...
}
La map e la unmap utilizzano alcune funzioni per allocare e deallocare le tabelle, e la loro definizione si trova nel file include/vm.h nella libce.
La libce fornisce una versione semplificata di queste funzioni, allocandole sullo heap, senza mai deallocarle.
Il modulo sistema invece fornisce una versione più sofisticata che mantiene per ogni tabella un contatore delle entrate valide che permette di deallocare le tabelle quando questo contatore vale 0.
(banalmente vengono contati i bit di presenza P settati)
4.7. Debugger
Nel debugger, digitando il comando help vm, avremo una serie di comandi che forniscono informazioni.
vm maps fornisce ad esempio informazioni sugli indirizzi virtuali in uso.