1. Indice
- 1. Indice
- 2. Architettura cpu-memoria-io
- 3. Memoria Cache
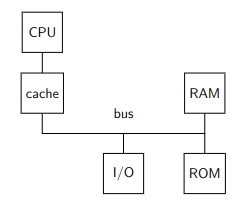
2. Architettura cpu-memoria-io
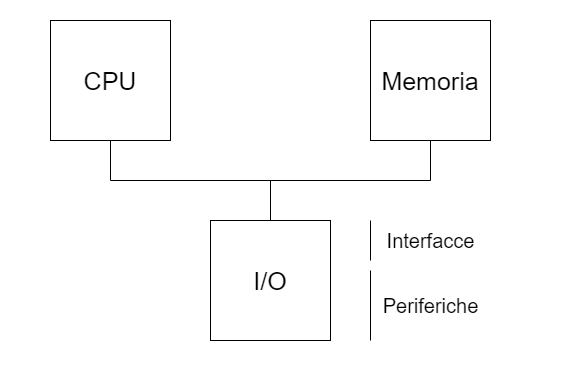
Andremo a studiare un’architettura Architettura CPU - Memoria (RAM e ROM) - I/O.
Questa architettura è stata progettata con lo scopo di eseguire software
Per il nostro studio diventa quindi importante saper rispondere alla domanda “chi sa cosa?”:
| Cosa conosce | Cosa non conosce | |
|---|---|---|
| CPU | Il contenuto dei propri registri | Il contesto esterno ai registri |
| Memoria | I dati salvati nelle proprie locazioni (indirizzi) come sequenze di 0 e 1 |
Il significato dei dati memorizzati |
| I/O | Le periferiche tramite interfacce, viste come letture/scritture di registri con effetti collaterali | Il significato delle operazioni, conosce solo l’effetto di lettura/scrittura sui registri |
| Bus | I segnali trasmessi uno alla volta in broadcast, tramite indirizzi nello spazio di memoria. In alcuni dispositivi intel più datati la I/O possedeva indirizzi propri separati dallo spazio di memoria |
Chi comunica. Sono infatti le singole componenti a capire se sono interpellate, tramite delle maschere di bit |
2.1. Flusso di Controllo
Abbiamo più volte detto che la CPU non fa altro che leggere e eseguire le istruzioni una alla volta.
Per capire però dove recuperare una nuova istruzione una volta eseguita quella precedente va a consultare l’istruction Pointer %rip che viene aggiornato dell’operazione precedente.
Il controllo è unico e può essere solo scambiato tra i vari stati della CPU, a loro volta scanditi dal programma in esecuzione.
Al’avvio del calcolatore però il contenuto della memoria RAM è casuale.
È quindi necessario che il programma di bootstrap, ovvero quelle informazioni necessarie a inizializzare in maniera corretta l’%rip.
Il programma bootstrap deve essere salvato in una memoria ROM sulla quale il programma deve essere salvato.
All’inizio della storia dei calcolatori il programma di bootstrap veniva caricato manualmente dagli operatori ad ogni accensione del calcolatore.
La ROM permette di non dover fare più questa operazione, è infatti sufficente impostare che in fase di /reset la CPU vada a consultare quest’ultima. Il BIOS è contenuto in questa parte di programma.
2.2. Informazioni Hardware o Software?
È importante riuscire a distinguere se una determinata cosa sia fatta in hardware o software.
Per capire se è l’hardware a fare una determinata cosa bisogna domandarci:
“Quella componente ha già al suo interno tutte le informazioni necessarie alla risoluzione di $x$?”
Se invece vogliamo capire se è software ci domandiamo:
“Il flusso di controllo è assegnato a quel processo? Come avviene questo passaggio al programma $p$? Siamo effettivamente in grado di scrivere il software $p$?”
2.3. Memoria
La memoria è un dispositivo al quale è possibile un accesso al byte, che ha costo costante qualsiasi sia l’indirizzo specificato. Gli indirizzi esistono sempre tutti. Ciò significa che qualsiasi indirizzo può essere interpellato in qualsiasi momento, indipendentemente dal fatto che sia assegnato o meno ad una componente.
È bene familiarizzare fin dall’inizio con questi casi notevoli:
-
1Byte$\to$ 2 cifre esadecimali -
512$\to$ $(1000)_8$ -
4Ki$\to$ $(1000)_{16}$, $(10.000)_8$ -
1Mi$\to$ $(10.000)_16$ -
4Gi$\to$ $(100.000.000)_16$
Inizialmente la memoria era accedibile tramite parole, ovvero sequenze di bit che identificavano un determinato indirizzo.
Per modificare un bit bisognava recueprare l’intera parola (anche sequenze di 4/8 Byte per modificare un solo bit).
Nelle memorie per processori Intelx86 che vedremo le dimensioni degli accessi in memoria sono i seguenti:
B |
W |
L |
Q |
|
|---|---|---|---|---|
| Byte | 1 |
2 |
4 |
8 |
| Bit | 8 |
16 |
32 |
64 |
Le varie opzioni sono rimaste retrocompatbili con le vecchie versioni e sono state implementare per ottimizzare le informazioni.
Ad esempio nei sistemi a 32bit non esistono le esecuzioni quad Q, ma su 64 sono molto utili invece di utilizzare più letture a 32bit.
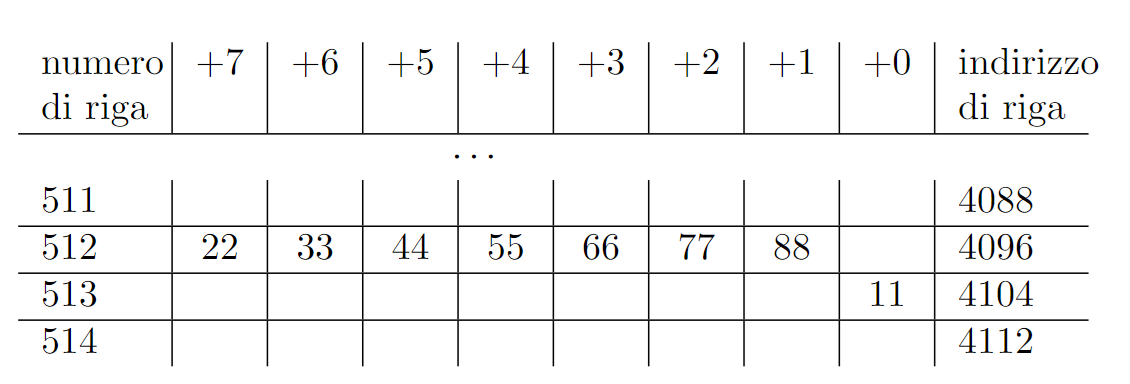
Un indirizzo a 8Byte (64bit) è come il seguente:
0xaabbccdd00112233
Se l’indirizzo si legge a partire dalla fine (33) si dice in notazione Little Endian, altrimenti se si legge a partine dalla testa (aa) si dice in notazione Big Endian.
Le architetture Intel e la maggiorparte di quelle utilizzate sono tutte Little Endian, mentre i protocolli web sono Big Endian.
Se salvassimo il valore sopra all’indirizzo 8 conviene utilizzare la seguente rappresentazione per non confondersi
| +7 | +6 | +5 | +4 | +3 | +2 | +1 | +0 | Indirizzo Base |
|---|---|---|---|---|---|---|---|---|
| 0 | ||||||||
aa |
bb |
cc |
dd |
00 |
11 |
22 |
33 |
8 |
| 16 | ||||||||
| 24 | ||||||||
| 32 | ||||||||
| 40 |
2.3.1. Offset
Innanzitutto bisogna sottolineare che le operazioni sugli indirizzi vanno sempre pensate come operazioni modulo $2^n$.
L’offset identifica il numero di bit da sommare per arrivare da un bit ad un altro tramite la formula: $fine - inizio$.
L’offset è un valore che può essere sia negativo che positivo. Se non volessimo un offset negativo possiamo sfruttare il wrapper-up degli indirizzi, che sono modulati. Infatti se $y < x$: \(y - x = |x - y|_{2^n}\)
Gli offset che si trovano all’interno delle istruzioni AMD64 usano la rappresentazione in c2 con segno.
2.3.2. Intervalli
Un intervallo (range) è una sequenza di indirizzi. Se invece andiamo a considerare degli insiemi di indirizzi li possiamo definire come: \([x, y) := \{n\quad | \quad x \le n < y\} \quad \Leftrightarrow \quad x < y \\ x: \text{Base dell'intervallo} \\ y: \text{Limite dell'intervallo}\)
Per evitare problemi con il wrapper-up della memoria vietiamo tutte le notazioni $[x, y) \wedge x > y$. L’unica eccezione valida è l’insieme $[x, 0)$ che identifica tutte le locazioni a partire da $x \ne 0$ fino alla fine.
Il privilegio di questa definizione è che possiamo ricavare molto semplicemente la lunghezza dell’intervallo (numero di elementi): $\quad l = y - x$
2.4. Oggetti Allineati
Tutte le definizioni successive faranno riferimento ad un oggetto $o$ così definito: $o := [x, x+l)$.
2.4.1. Allineamento a un numero $2^n$
Un oggetto $o$ si dice allineato a un numero $2^n$ se $|o|_{2^n} = 0$, ovvero se: \(\boxed{o = k\cdot 2^n}\)
Per verificare quindi che un indirizzo sia allineato a 4 basta verificare che le LSB siano un multiplo di 4.
0xaa...4344$\to$ allineato0xaa...4355$\to$ non allineato
2.4.2. Allineamenti ad oggetti
Un oggetto $o$ si dice allineato ad un’altro oggetto $y$ con $sizeof(y) = 2^k \wedge k > 0$ se: \(\boxed{|o|_{sizeof(y)} = 0}\)
2.4.3. Allineamento Naturale
Un oggetto $o$ si dice allineato naturalmente se \(\boxed{|o|_{sizeof(o)} = 0}\)
2.5. Regione e Confine
I confini non sono altro degli indirizzi particolari. Una regione è identificata da due confini.
Per fare un esempio pratico, ipotizziamo di avere uno spazio a 64bit e di stabilire i seguenti confini:
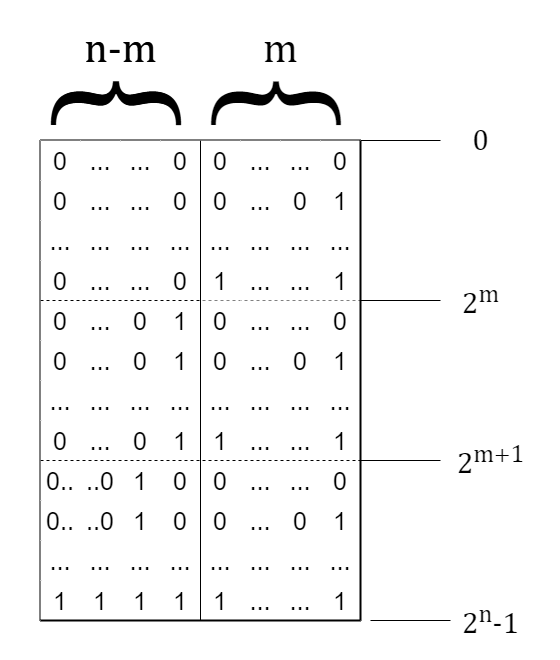
La prima regione $[0, 2^m)$ sarà identificata da indirizzi che hanno gli $n-m$ bit più significativi che sono 0.
La seconda regione $[2^m, 2^{m+1})$ sarà invece identificata da indirizzi che hanno gli $n-m+1$ bit più significativi impostati a 0 mentre l’$m$-esimo bit settato a 1
La terza regione invece $[2^{m+1}, 2^n-1)$ è quindi identificata da tutti i restanti indirizzi, che hanno come caratteristica quella di avere l’$m+1$-esimo bit a 1 e i restanti variabili
Possiamo notare che, per ogni regione, gli ultimi $m$ bit rappresentano l’offset dal confine di inizio della regione.
Nella memoria RAM possiamo identificare una regione come uno spazio di 8Byte.
Assegneremo quindi ad ognuna un numero, detto numero di riga, che la identificherà.
Ciò significa che dato un indirizzo A[63:0], il numero di riga verrà identificato dai bit A[63:3]. I restanti A[2:0] rappresentano l’offset all’interno della riga, e vengono chiamati Byte Enabler BE.
2.6. Comunicazione CPU-Memoria
Il formato delle istruzioni Intelx86 può avere al massimo 1 operando esplicito in memoria.
Tuttavia è possibile operare con due operatori in memoria, attraverso operazioni che hanno accessi impliciti.
Alcuni esempi sono la MOVS, PUSH (%rdi), POP(%rdi).
Una qualsiasi informazione che va nella memoria possiede due proprietà:
- Indirizzo: indirizzo della prima locazione di memoria desiderata
- Dimensione: talvolta si deduce dai registri, talvolta necessita di essere esplicitata con il suffisso, indica a quanti byte vogliamo accedere.
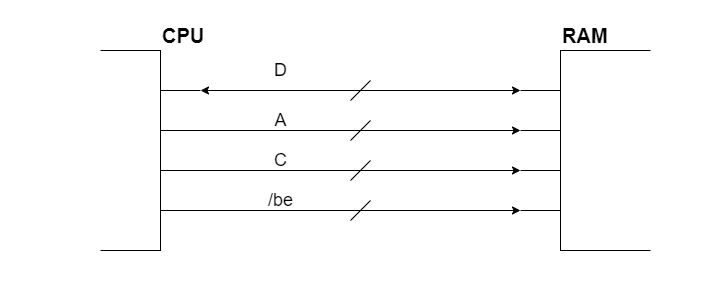
CPU e RAM sono collegate da un bus che è composto da:
D: Rappresenta le Linee di indirizzo. In teoria sarebbero64ma nei processori Intelx86 il massimo è57. Nei processori comuni tendenzialmente questi fili però sono “solamente”48. Questo perché $2^{64}$ indirizzi di memoria sono decisamente troppi per un calcolatore comune.A: indica il numero di riga in RAM alla quale vogliamo accedere.C: rappresenta i fili che contengolo le variabili di controllo (/mw,/mr, …)/be: sono i Byte Enabler. Ne esiste uno per ogni byte di una riga. Vengono utilizzati principalmente in scrittura, perché permettono di poter modificare solamente i singoli bit in un indirizzo.
Il singolo chip di RAM avrà come collegamenti possibili:
/s: selectA: indirizzo/r: comando di lettura/w: comando di scritturaD: dati, su8bit
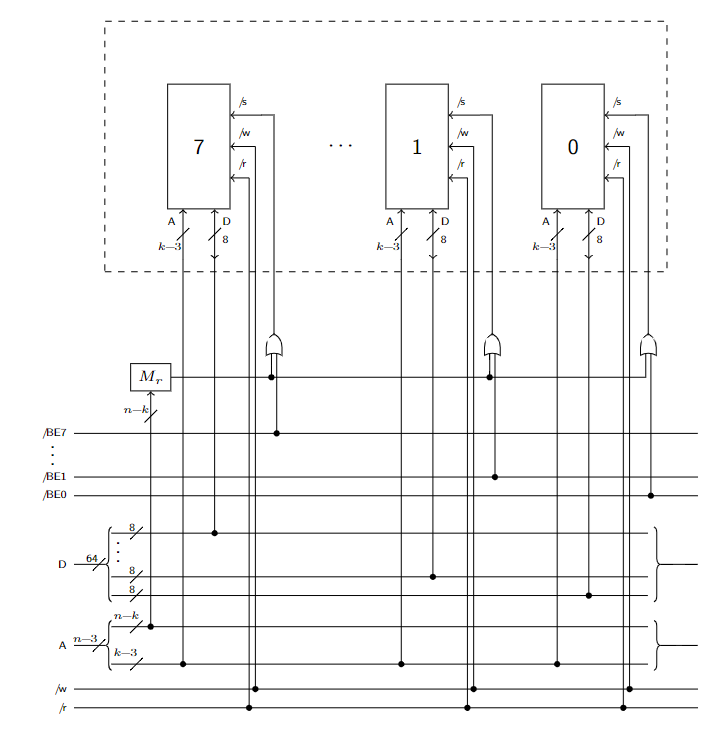
L’interno del rettagolo tratteggiato è una scheda di memoria, la parte esterna è il bus.
Ipotizzando un calcolatore a $n$ bit.
Per l’$i$-esimo chip di RAM dovremo collegare:
assign w_ = W_;
assign r_ = R_;
assign Di = D[8*i + 7 : 8*i];
// Il padding corretto del bus dei dati
assign Ai = A[(k-3)-1 : 0];
/*
* k-3 perché ogni riga di indirizzo contiene 8 indirizzi,
* Se tutti i chip devono memorizzare 2^k byte, ognuno ne memorizzerà:
* 2^k / 8 -> 2^(k-3) byte
* Ciò implica che
*/
wire mask_; assign mask_ = A[n - 1 : n - k] ^ indirizzo_di_riga;
/*
* Metto in OR (sono attivi bassi) :
* - Il bit corrispettivo del Byte Enabler
* - XOR tra la parte alta di A e l'indirizzo della riga
*
* Questo si fa per determinare se la regione è quella interpellata
*/
assign s_ = (BE_[i] | mask_);
Data questa configurazione risulta chiara l’importanza degli allineamenti.
Se volessimo infatti accedere a indirizzi non allineati è necessario fare 2 accessi. Inoltre potrebbe diventare necessario sitemare il padding dei byte, in quanto quelli all’indirizzo precedente si trovano nella regione delle MSB, anche se per quello che ci riguarda sono nella LSB.
Tutte queste operazioni vengono eseguite non dal software (l’operazione MOVQ 4097, %RAX di fatto fa tutto in una riga), ma dall’hardware, in particolare nel $\mu$-codice che implementa l’accesso in memoria che si trova nella CPU.
2.6.1. Intervalli e allineamenti
Non necessariamente avremo intervalli $[x, y)$ che andiamo ad interrogare si trovano in un’unica regione.
Quello che il processore deve essere in grado di fare è stabilire in quali regioni si trovi questo intervallo.
Per fare ciò, dovremo quindi stabilire un modo per capire come determinare la prima regione toccata e la prima regione non toccata dall’intervallo.
Conoscendo la lunghezza $b$ di ogni sezione:
- Prima regione toccata:
r1 = x >> b - Prima regione non toccata:
r2 = (((y-1) >> b) + 1) & ((1UL << b) - 1)
Per quanto riguarda l’offset del primo indirizzo nella regione lo calcoliamo così: off = x & ((1UL << b) - 1)
2.7. Spazio di I/O e periferiche
Nei sistemi moderni è presente un sistema di protezione che non ci permette di accedere alle periferiche della macchina.
Noi andremo a studiare una macchina virtuale QEMU priva di questa protezione, in modo da poter capirne il funzionamento.
La macchina sarà priva di qualsiasi programa di bootsrap e conterrà solamente le informazioni per l’accensione e il singolo programma che inseriremo noi.
Nella programmazione a basso livello che andremo a fare tutte le operazioni sono lecite, e la memoria sarà tutta a nostra disposizione.
È importante sottolineare che la CPU non conosce i nomi delle variabili ma esclusivamente i loro indirizzi.
Le periferiche che andremo a studiare sono simulazioni delle periferiche dello standard ISA, compatibile con tutti i produttori di PC IBM-compatibili e cloni. Queste periferiche fanno riferimento alle vecchie periferiche del PC AT dell’IBM. L’hardware moderno tende comunque sempre ad emulare queste periferiche più antiche.
Le periferiche sono quindi:
- Tastiera (PC AT)
- Video (standard VGA)
- Timer (PC AT)
- HardDisk (PC AT quando venne inserito)
2.7.1. Tastiera
Lo scopo della tastiera è di rilevare i tasti premuti e rilasciati e di comunicarli al PC.
Nelle tastiere a (quasi) ogni tasto fisico è associato un codice di scansione, che si divide in make code (pressione) e break code (rilascio). È il software che interpreta il codice di scansione come codice ASCII.
La pressione prolungata viene interpretata come sequenza di caratteri uguali in maniera meccanica dalla tastiera stessa, dopo un determinato intervallo di tempo detto typemeter.
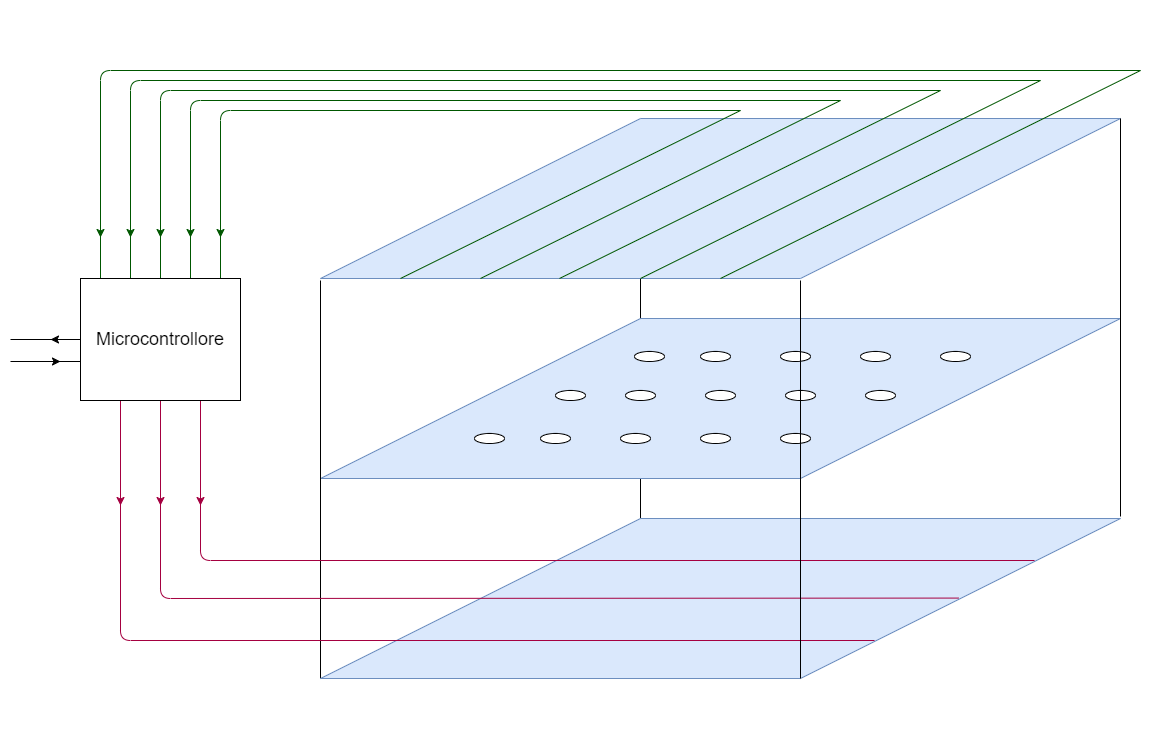
La tastiera è composta da 3 fogli di plastica:
- Il primo ha delle traccie verticali
- Quello centrale non ha tracce, ma dei buchi in corrispondenza tra i tasti.
- L’ultimo ha delle tracce orizzontali
Quando premiamo un tasto, un pulsantino comprime i fogli e mette in conduzione un traccia orizzontale e una verticale.
Collegato alle tracce (sia verticali che orrizontali) si trova un microcontrollore (ROM e piccolo chip con processore e RAM). Il microcontrollore invia migliaia di impulsi al secondo sulle tracce di uno dei due fogli (nell’immagine quello in basso).
Se non ci sono pulsanti premuti non ha segnale di ritorno, altrimenti lo ha in corrispondenza della traccia incolonnata.
A questo punto aggiornerà la RAM con la chiave selezionata e manderà segnale di pressione/sollevamento a seconda che la chiave sia stata aggiunta o rimossa.
Sulla scheda madre si trova un’ulteriore microcontrollore con 4 registri (RBR, TBR, STR, CMD).
Il segnale in entrata salva l’ultimo codice di scansione in RBR aggiornando opportunamente il registro di stato STR.
È possibile comunicare alla tastiera diverse informazioni, alcune delle quali sono:
- Typemeter
- Eventuali led della tastiera.
Il software si occupa di convertire i codici di scansione inviati dalla tastiera in codice ASCII:
#include<libce.h>
namespace kbd{
const natl MAX_CODE = 29;
bool shift = false;
natb tab[MAX_CODE] = { // tasti lettere (26), spazio, enter, esc
0x10, 0x11, 0x12, 0x13, 0x14, 0x15, 0x16, 0x17, 0x18, 0x19,
0x1E, 0x1F, 0x20, 0x21, 0x22, 0x23, 0x24, 0x25, 0x26,
0x2C, 0x2D, 0x2E, 0x2F, 0x30, 0x31, 0x32, 0x39, 0x1C, 0x01
};
natb tabmin[MAX_CODE] = {
'q', 'w', 'e', 'r', 't', 'y', 'u', 'i', 'o', 'p',
'a', 's', 'd', 'f', 'g', 'h', 'j', 'k', 'l',
'z', 'x', 'c', 'v', 'b', 'n', 'm', ' ', '\n', 0x1B
};
natb tabmai[MAX_CODE] = {
'Q', 'W', 'E', 'R', 'T', 'Y', 'U', 'I', 'O', 'P',
'A', 'S', 'D', 'F', 'G', 'H', 'J', 'K', 'L',
'Z', 'X', 'C', 'V', 'B', 'N', 'M', ' ', '\r', 0x1B
};
char conv(natb c){
natb cc;
natl pos = 0;
while(pos < MAX_CODE && tab[pos] != c)
++pos;
if(pos == MAX_CODE)
return 0;
if(shift)
cc = tabmai[pos];
else
cc = tabmin[pos];
return cc;
}
char char_read(){
natb c;
char a;
do{
c = get_code();
if(c == 0x2A)
shift = true; // left-shift make
else if(c == 0xAA)
shift = false; // left-shift break
}while(c >= 0x80 || c == 0x2A);
a = conv(c);
return a;
}
}
void main(){
char c;
for (;;) {
c = kbd::char_read();
if (c == 0x1B)
break;
vid::char_write(c); // Se c == 0 non fa niente
}
}
2.7.2. Video
Andiamo adesso a studiare la periferica per il video tramite teconologia VGA (Video Graphic Adapter), perché studiare quelle moderne con collegamenti con teconologia USB è molto più complesso, e poco rilevante per gli scopi di questo corso.
L’idea del video è quello di avere una sua propria memoria video, alla quale è possibile accedere come se fosse una normale memoria.
Questo è un primo esempio di qualcosa che sta nello spazio di memoria diverso dalla RAM. Questa memoria può essere più o meno grande, ma in qualsiasi caso abbastanza da poter contenere tutta la pagina mostrata a schermo.
La memoria video è particolare dal punto di vista hardware, poiché ha 2 porte di accesso (invece di una sola come la RAM):
- 1 verso la CPU (identica alla RAM)
- 1 verso l’adattatore video
L’adattatore video può leggere tutta la memoria, e lo fa un numero diverso di volte al secondo (30, 60, 90, 120, …).
La teconologia VGA permette l’interpretazione da parte dell’adattatore della memoria in due modi:
- Modalità Testo
- Modalità Video
2.7.2.1. Modalità Testo
Sia la memoria che il display vengono interpretati come caratteri ASCII e ogniuno viene portato in una determinata intersezione riga-colonna.
Di default i vecchi dispositivi si accendono in questa modalità.
La nostra macchina QEMU ha proprio un display di 80x25 (200 caratteri totali)
.
L’adattatore ha una sua memoria ROM che associa ad ogni codice ASCII un determinato font da poi mostrare sul testo.
In memoria ogni carattere non è definito solo dal suo ASCII, ma anche da una sezione di attributo colore.
| Blinking | Background | Foreground | ASCII |
|---|---|---|---|
| Blinking | RGB | IRGB | |
1bit |
3bit |
4bit |
8bit |
(il bit di blinking indica se il carattere lampeggia, in QEMU è inutile)
Nella nostra macchina la modalità video inizia all’indirizzo 0xB8000;
Nonostante gli indirizzi non siano anch’essi che una serie di bit, in c++ per poterli utilizzare come tali è necessario reinterpretarli attraverso un cast:
#include <libce.h>
namespace vid{
natw* video = reinterpret_cast<natw*>(0xB8000); //array di 2000 word
}
Vediamo quindi un esempio di utilizzo della modalità testo.
Ipotizziamo di voler riempire tutto il nostro schermo con la lettera 'a' di color azzurro chiaro con sfondo rosso.
Il codice è il seguente:
void main(){
for(int i = 0; i < 2000; i++)
vid::video[i] = 0x4B00 | 'a';
/*
* Il numero esadecimale `0x4B00` indica nelle sue cifre:
* - 0b0100: sfondo rosso senza blink
* - 0b1011: colore azzurro con intesità 1
* - 0x00: padding l'OR con il codice ASCII
*/
for(;;){
char c = kbd::char_read();
if(c == 0x1B) // ASCII -> esc
break;
}
}
Vediamo altre implementazioni sulla modalità testo.
Un comportamento che ci aspettiamo è che, quando terminiamo lo spazio nello schermo, venga inserita una nuova riga e che la prima riga sparisca con tutta la pagina che scrolla. Un modo che abbiamo per realizzare questo comportamento è copiare tutte le righe $i \ne 1$ nella posizione $i-1$. In fondo andiamo a inserire una nuova riga “vuota” nell’ultima locazione di memoria:
namespace vid {
void scroll(){
natw work = attr;
for (unsigned int i = 0; i < VIDEO_SIZE - COLS; i++)
video[i] = video[i + COLS];
for (unsigned int i = 0; i < COLS; i++)
video[VIDEO_SIZE - COLS + i] = ' ' | work << 8;
y--;
}
}
Per implementare invece il backspace:
namespace vid{
void char_write(char c){
switch(c){
case 0:
break;
case '\b':
if(y == 0 && x == 0)
break;
if(x == 0){
y--;
x = COLS - 1;
}
else{
x--;
}
video[y * COLS + x] = attr | ' ';
}
}
}
Il cursore lampeggiante è hardware e se ne occupa la scheda video, perciò è sufficiente comunicare alla scheda video la sua posizione.
È importante sapere che IND e DAT sono gli unici registri visibili da fuori della scheda video.
La posizione del cursore invece si trova su altri due registri da 8bit (la posizione sarebbe da 16, la dividiamo in un CUR_HIGH e CUR_LOW).
Per modificare questi registri si inserice il loro indirizzo su IND, e la modifica su DAT.IND funziona da switch che collega le modifiche di DAT al registro specificato.
const natl ROWS = vid::rows();
const natl COLS = vid::cols();
namespace vid{
const ioaddr IND = 0x03D4;
const ioaddr DAT = 0x03D5;
const natl VIDEO_SIZE = COLS*ROWS;
const natb CUR_HIGH = 0x0e;
const natb CUR_LOW = 0x0f;
natw attr; // Attributo colore
natb x, y; // coordinate inizialmente nulle;
volatile natw* video = reinterpret_cast<natw*>(0xB8000);
void cursor(){
natw pos = COLS * y + x;
outputb(CUR_HIGH, IND);
// Seleziona il registro CUR_HIGH e scrive il suo indirizzo in IND
outputb(pos >> 0x8, DAT);
// Inserisce la parte alta della posizione in CUR_HIGH utilizzando DAT
outputb(CUR_LOW, IND);
// Seleziona il registro CUR_LOW e scrive il suo indirizzo in IND
outputb(pos, DAT);
// Inserisce la parte alta della posizione in CUR_LOW utilizzando DAT
}
}
2.7.2.2. Modalità Grafica
La modalità grafica può andare dal complicatissimo all’estremamente semplice. Questa permette al programmatore di accedere e modificare i singoli pixel nella matrice.
La modalità più semplice per l’utilizzo è quella tramite frame-buffer, nella quale si può decidere il colore di ogni pixel nell’indirizzo corretto inserendo il colore su 8bit (così da avere una matrice di byte).
Il passaggio tra modalità è estremamente complesso e quello che vedremo noi è semplificato dalla virtualizzazione della macchina.
Tolto questo accorgimento, la modalità gradica funziona in maniera analoga alla modalità testo.
Nelle moderne schede video si trova inoltre un coprocessore grafico, che si occupa escusivamente di fare i disegni in parallelo al processore che esegue altre operazioni. Nel nostro caso non utilizzeremo il coprocessore ma faremo tutto da software:
const natl COLS = 1280;
const natl ROWS = 1024;
volatile natb* framebuffer;
void main(){
framebuffer = svga::config(COLS, ROWS);
natb c = 0x40;
for(natl i = 0; i < COLS; i++)
for(natl j = 0; j < ROWS; ++j)
framebuffer[j * COLS + i] = c;
}
2.7.3. Timer
È un interfaccia che permette di contare il tempo che passa. Viene implementata tramite un’interfaccia più generale che conta degli eventi, in particolare degli impulsi elettrici.
Se si collega l’ingresso con il clock allora otteniamo un timer di clock.
All’interno del PC IBM c’è uno sheet che ha 3 interfacce di conteggio.
Ognuna di queste interfacce è collegato al clock (di circa 1Mhz).
Questi contatori possono essere programmati in maniera indipendente, e ognuno ha un suo ruolo specifico:
-
Contatore 0: (lo vedremo più avanti).
-
Contatore 1: era utilizzato originariamente per il refresh della RAM, oggi è in disuso;
-
Contatore 2: collegato all’unico dispositivo audio del PC, veniva utilizzato per mandare onde quadre di periodo proporzionale al clock e ad una costante all’amplificatore.
Vediamo intanto come utilizzare il contatore 2 per comunicare con il PC speaker.
È importante intanto dire che il contatore non è collegato direttamente allo speaker ma prima passa una porta AND con il registro SPR all’indirizzo 0x61.
Questa struttura permetteva il mute qual’ora venisse inserito 0 all’intenro di SPR, oltre a poter fare dei giochetti particolari con l’audio.
In questa interfaccia ogni contatore ha 4 registri:
- 2 accessibili
- 2 non accessibili
Inoltre è presente un’ulteriore registro comune.
Dei 4 registri di ognuno, 2 sono solo in scrittura e 2 solo in lettura.
namespace timer{
// Regitro comune - Control Word Register
const ioaddr iCWR = 0x43;
const ioaddr iSPR = 0x61;
// Solo in scrittura
const ioaddr iCTR2_LSB = 0x42;
const ioaddr iCTR2_MSB = 0x42;
void start(natw N){
outputb(0XB6, iCWR); // contatore 2, modo 3
outputb(N, iCTR2_LSB);
outputb(N>>8, iCTR2_MSB);
}
void enable_spk{
outputb(3, iSPR);
// bit 0 abilita la porta AND
// bit 1 abilita il contatore 2
}
void disable_spk{
outputb(0, iSPR);
// bit 0 abilita la porta AND
// bit 1 abilita il contatore 2
}
}
main(){
timer::start2(1190); // costante 1000 Hz
timer::enable_spk();
pause();
timer::disable_spk();
}
2.7.4. Hard Disk
L’hard disk è una memoria di massa. Il processore non può eseguire i programmi nell’hard disk, per via di incopatibilità nelle interfacce.
Gli hard disk operano a blocchi (tendenzialmente 512Byte), e possono trasferire solo multipli del blocco.
La comunicazione viene comunque effettuata tramita un’interfaccia con il bus, che deve essere gestita da software.
Noi vedremo l’interfaccia del PC AT, che poi è diventata SATA (Serial Attatchement).
L’hard disk che studiaremo non sono gli SSD ma sono quelli con disco.
Questi HD sono formati da diversi dischi di materiale ferromagnetico che girano costantemente ad una certa velocità (rpm) e che vegono letti da una testina estesa da un braccio che si muove ruotando attorno ad un perno. Le informazioni possono essere salvate su entrambe le facce di un disco.
L’insieme di queste parti si chiama drive.
L’informazione su questi dischi è organizzata in settori (spicchi) e tracce (corridoi concentrici). L’intersezione tra un settore e una traccia si dice blocco.
Nella lettura la testina recupera un blocco e lo invia all’interfaccia. Successivamente tramite software verrà recuperato. Nella scrittura si scrive via software su un blocco che poi verrà trasmesso alla traccia e successivamente salvato nel blocco desiderato nei dischi.
Per poter stipare il tempo per una lettura/scrittura dobbiamo considerare tre parametri:
- Seek: è il tempo che ci mette la testina ad arrivare ad una certa posizione $\bigl(\in O(ms)\bigr)$.
- Latency: è il tempo che ci mette un settore ad arrivare a portata della testina $\bigl(\in O(ms)\bigr)$.
- r/w time: è il tempo necessario per leggere in maniera corretta e completa un blocco. $\bigl(\in O(\mu s)\bigr)$.
L’ultimo tempo nella storia recente è migliorato significatamente. All’inizio la testina veniva fatta fluttuare sui dischi e, in caso di assenza di corrente, l’energia prodotta dalla rotazione del disco veniva utilizzata per far spostare in posizione di riposo e non graffiare il disco la testina. Oggi vengono usati dei fermi sulla testina, così da permettere di avvicinarla, riducendo in maniera significativa il tmepo di lettura/scrittura.
Ulteriori parametri da considerare per determinare la velocità di un accesso sono la geometria e la formattazione del disco. Infatti nei blocchi più esterni la lettura è più rapida ma presenta anche più byte sprecati.
Le locazioni non vengono utilizzate dal programmatore con il loro vero numero, bensì viene creata dall’interfaccia un’array di blocchi chiamato LBA (Logical Block Address) che non fa testo sulle posizioni reali dei blocchi ma crea come una hashmap che non comunica all’utilizzatore.
2.7.4.1. Hard Disk - Interfaccia
L’interfaccia che vedremo noi è quella con i registri che fanno riferimento ai primi HD dell’IBM, ovvero l’interfaccia ATA.
Introduciamo intanto il concetto di cilinder.
Il cilinder è l’insieme delle tracce che stanno su tutte le testine, ovvero tutti i blocchi ai quali possiamo accedere in un certo istante senza muovere la testina.
L’interfaccia presenta diversi registri a 8bit e un registro a 16bit:
-
CNH/CNL(Cilinder Number High/Low): indicano rispettivamente la parte alta e quella basse del numero di cilindro. -
SNR(Sector Number): indica il numero di settore. HND(Head aNd Drive): negli ultimi 4 bit indica la posizione della testina, nei primi ci sono dei bit introdotti con il tempo, in particolare sono presenti:LBA(Logical Block Address): quando è settato combina le informazioni dei registri citati prima (meno significativiSNRpiù significativiHND) per poi inviare la comunicazione all’HD.LBA48: è un ulteriore bit che permette di inserire più volte i dati nei registri per inviare dati ancora più grandi.
-
SCN(Sector Count Number): indica il numero di blocchi in sequenza coinvolti nell’operazione a partire dal primo. -
BR(Buffer Register): unico registro a16bit, permette di leggere il buffer interno dell’interfaccia. Se i blocchi sono a512bitvanno effettuate 128 letture/scritture per trasmettere un blocco. STSregistro di stato a8bitche contiene un bit che permette di capire quando il registro in lettura è pronto per essere letto.
Ricordando che $2^9$ indica la dimensione in byte di un blocco, con questa interfaccia è possibile salvare ben 128GB:
\(2^{8 + 8 + 8 + 4} \cdot 2^9 \;= \; 2^{37}\:\text{B} \; = 2^7\:\text{GB} \;= 128\: \text{GB}\)
3. Memoria Cache
La RAM è estrememante lenta rispetto al processore, circa 200/300 volte più lenta, ciò mette in attesa il processore.
È possibile verificare il tempo che ci mette il processore ad accedere alla RAM variando la dimensione della lettura:
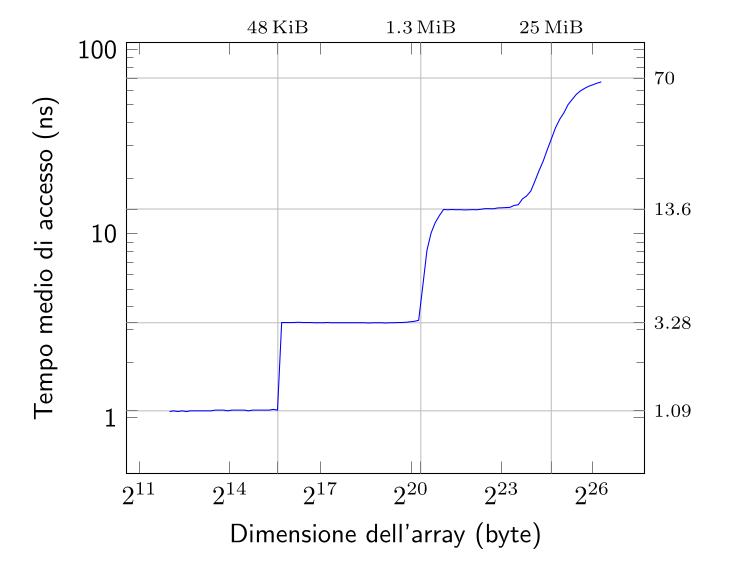
I primi 3 “scalini” sono dati dalla lettura non nella RAM, ma in un’altra memoria, chiamata cache.
La cache, a differenza della RAM Dinamica, è molto più veloce, e riesce a lavorare (almeno per informazioni di dimensioni “piccole”) nell’ordine di velocità del clock.
Un modo per avere RAM più veloci è quello di utilizzare le RAM Statiche invece di quelle dinamiche.
Le RAM Statiche conservano l’informazione tramite Flip-Flop, e sono realizzabili con 6/7 transistor.
Le RAM Dinamiche invece utilizzano microcondensatori che necessitano che l’informazione venga periodicamente “rinfrescata”.
| RAM Dinamiche | RAM Statiche |
|---|---|
| Grandi | Piccole |
| Economiche | Costose |
| Lente | Veloci |
Esiste tuttavia un modo per poter utilizzare RAM grandi, economiche e veloci. Infatti, nonostante l’accesso del programmatore alla memoria sia per definizione casuale, ovvero non predeterminato, in realtà nella maggior parte dei casi non lo è realmente.
Il codice infatti si distribuisce in locazioni di memoria sequenziali, e, statisticamente, raramente effettua salti casuali tra istruzioni. Su questa assunzione di base si fondano i due Principi di Località:
Principio di località Temporale: visto un dato è probabile che molto presto si voglia utilizzare di nuovo.
Principio di località Spaziale: visto un indirizzo è probabile che a breve ci si ritorni.
La memoria cache funziona proprio basandosi su questi principi. Infatti quando eseguiamo diversi accessi alla RAM, la cache sarà in ascolto di letture e scritture, salvando in locale i dati che i principi dicono che serviranno.
L’esecuzione della cache è gestita da un controllore che lavora in maniera totalmente trasparente, senza che il processore e il programmatore sappiano della sua esistenza. Tuttavia il programmatore può approfittare dei principi, affinché possa sfruttare al massimo la cache.
La memoria cache lavora solo sulla RAM, non ha alcun senso che lavori per l’I/O, poiché manca il principio base (I/O ha effetti collaterali voluti).
Il controllore verifica che un dato richiesto dalla CPU sia già stato memorizzato. Se lo è stato lo invia immediatamente, altrimenti effettua una lettura in RAM e lo invia alla CPU. Prima di inviarlo però lo salva localmente, eventualmente rimpiazzando altri dati che erano già salvati. La scelta di quale dato sovrascrivere può essere determinata automaticamente dall’architettura (come nel nostro caso) oppure può utilizzare diversi meccanismi di selezione specifici dell’architettura stessa.
3.1. Cache ad Indirizzamento Diretto
Quando il processore richiede una locazione di memoria, si effettua un controllo per verificare che si trovi o meno nella cache.
Il segnale di hit indica che la memoria si trova già nella cache, perciò è sufficente leggere quella.
In caso di scrittura con hit abbiamo due possibili politiche:
Write Through: scrive il nuovo valore sia in cache che in RAM;Write Back: scrive il nuovo valore solo nella cache.
Il segnale di miss indica invece che la memoria non è nella cache, perciò va recuperato dalla RAM per poter essere letto.
Anche in caso di miss la scrittura ha due possibili politiche:
Write Allocate: copia l’elemento dalla RAM nella cache prima della modifica, e poi lo ritrasmette aggiornato;Write No-Allocate: effettua l’aggiornamento solo in RAM, senza salvare nulla in cache.
Il motivo per il quale, data una riga, recuperiamo in cache tutta la sezione dov’è contenuta è perché, per il principio di località, è probabile che il processore richieda in un secondo momento locazioni vicine (località spaziale). Inoltre, se il tempo di lettura di una riga fosse $t$, quella di lettura di un blocco è un tempo $\ll 8t$.
Con questo tipo di cache, detta ad indirizzamento diretto, si possono generare conflitti tra sezioni.
In particolare, le sezioni che possono fare conflitto in una stessa locazione sono ${\dim{(\mathbf{RAM})} \over \dim{(\mathbf{cache})}}$, ovvero quelle allineate naturalmente a l, con l che indica il numero di cache line disponibili.
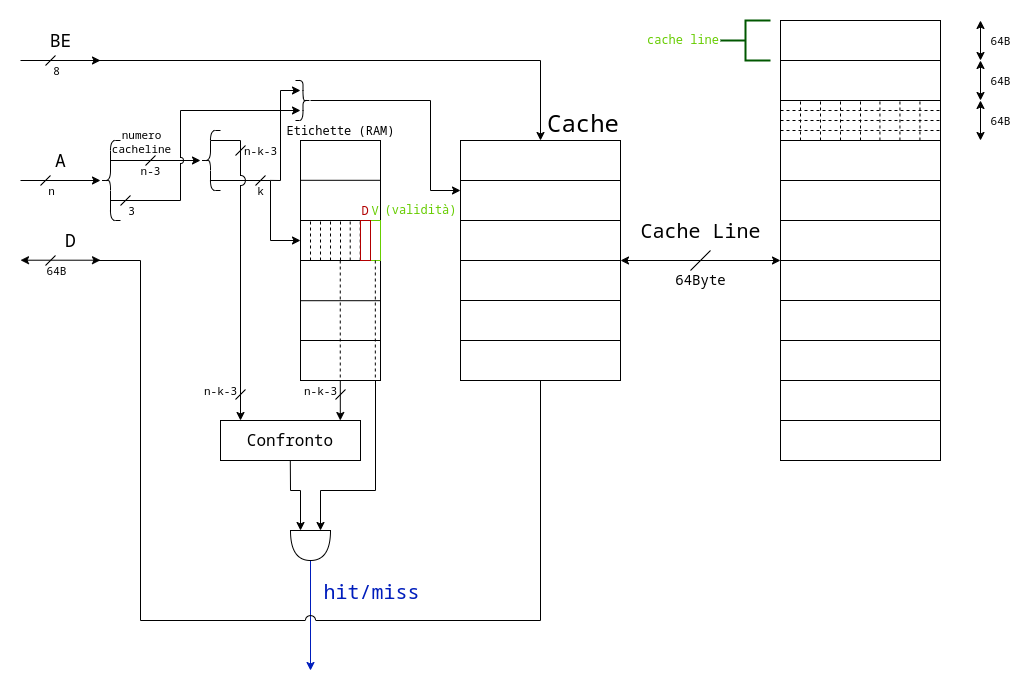
Ipotizzando che la cache abbia l locazioni, otteniamo che i bit di riga sono gli utlimi k = log(l) (tolti gli ultimi 3 che identificano la riga all’interno del blocco).
Le etichette sono quindi grandi n-k-3+2 bit, poiché l’ultimo bit, detto validity, serve per capire se l’etichetta in quella riga è valida o contiene valori casuali, mentre il penultimo, detto dirty, serve per ottimizzare i tempi in caso di scritture in RAM dovute a rimpiazamenti di cacheline.
Per quanto riguarda la write-back, la scrittura verrà comunque eseguita in RAM prima o poi, nel peggiore dei casi quando quella cache line viene sostituita.
Il guadagno del non fare direttamente il write-through si vede quando effettuiamo un numero molto elevato di scritture nella stessa cache-line.
Per migliorare il tempo si aggiunge un’ulteriore bit alle etichette chiamato D (Dirty) che identifica se in una determinata cache-line sono avvenute o meno scritture.
Questo tipo di cache è particolarmente poco efficente quando cerchiamo di accedere a due cacheline in memoria allineate naturalmente alla dimensione della cache.
In questo caso ogni accesso causa una miss, proprio perché i due indirizzi collidono.
Un modo per risolvere il problema è attraverso le cache associative ad insiemi.
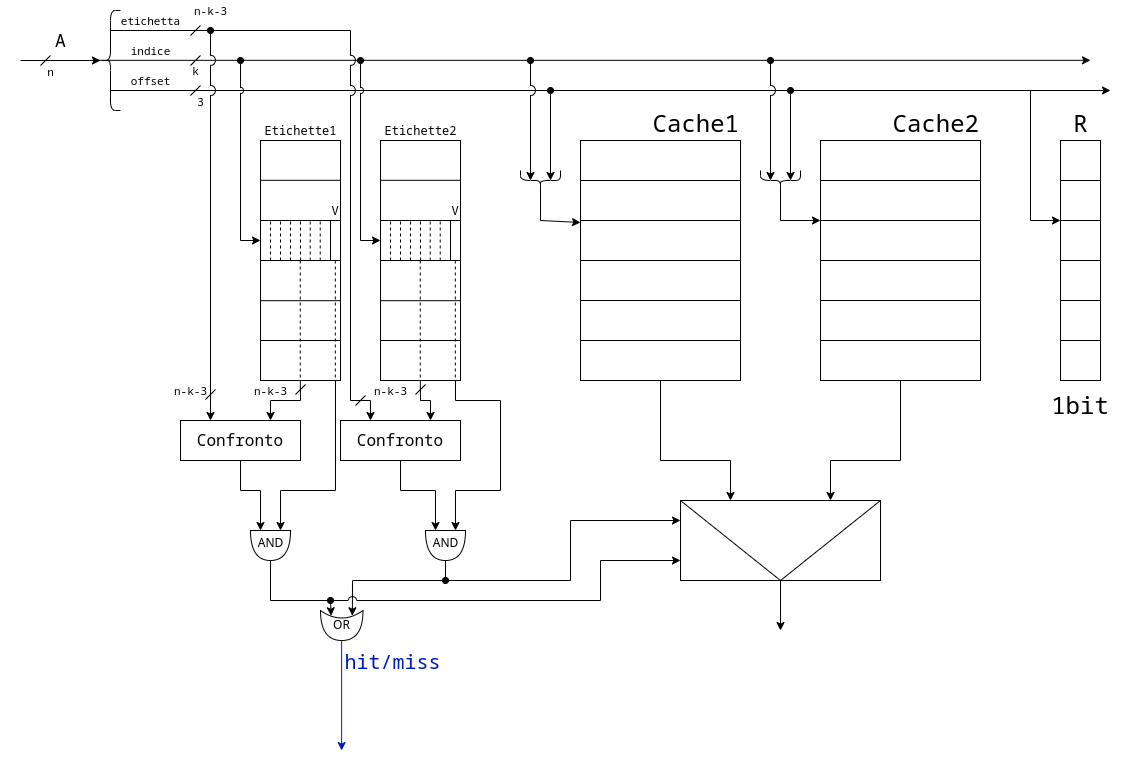
3.2. Cache Associative ad Insiemi
Si basano sulle cache ad indirizzamento diretto. Infatti non sono altro che più cache allineate tra di loro:
L’esempio a destra è con due cache.
Si utilizzano le due cache in parallelo, in caso di conflitti, andremo a sovrascrivere la cacheline che non si utilizza da più tempo.
Oltre alle cache, si introduce anche un ulteriore registro R che contiene tanti bit quanti sono necessari per ricordare l’ordinamento delle scritture.
In caso di due vie in R è sufficente 1bit, che codifica quale delle due cache non si utilizza da più tempo in quella line.
In caso di quattro vie il registro viene chiamato LRU e contiene 5bit.
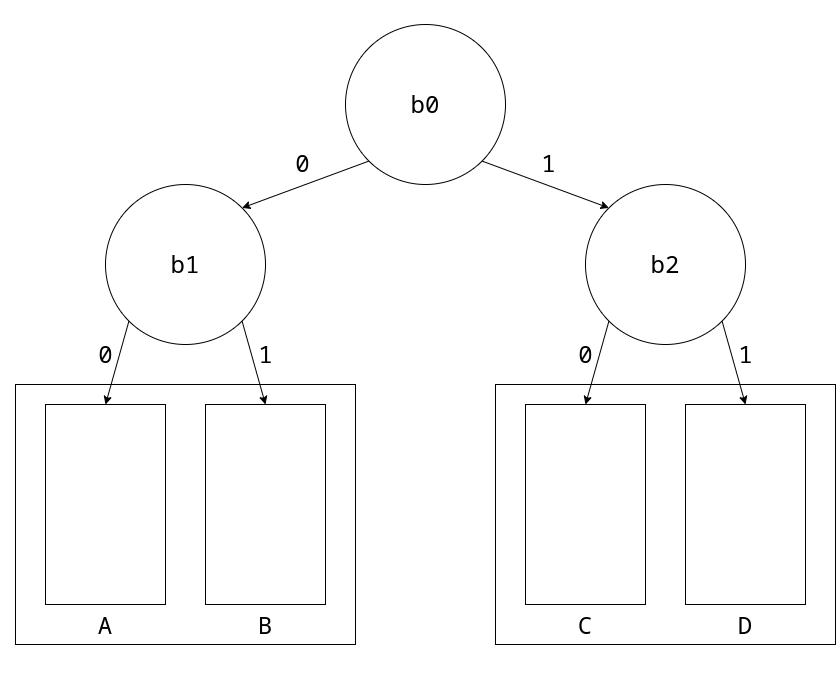
Tuttavia, nel processore x86, è stato implementato uno pseudo-LRU a 3bit
Vediamo come si comporta lo pseudo-LRU ipotizzando di fare sempre miss.
Lo stato iniziale è 000 (b0|b1|b2).
Il primo accesso verrà salvato nella cache A seguendo il percorso b0-b1.
Questi bit vengono quindi invertiti, portando il nuovo stato a 110.
Il secondo accesso seguirà quindi il percorso b0-b2 nella cache C, con nuovo stato 011.
Il terzo accesso avverrà in B portando lo stato a 101.
Infine il quarto accesso avverrà in D riportando lo stato a 000.
Questa politica si chiama pseudo-LSU perché, ipotizzando di aver appena salvato una cacheline in C, il prossimo miss salverà la cacheline in B. Quando, magari, in realtà abbiamo fatto un accesso più vecchio a D che dovrebbe essere lui a cambiare.
Tuttavia anche con il registro LRU è possibile generare sempre miss.
Basta infatti effettuare un accesso in più di quelli possibili in parallelo, ad esempio se avessimo quattro cache e facessimo l’accesso a 5 linee allineate, genereremmo sempre una miss.
Questo è ciò che genera gli “scalini” nel grafico visto all’inizio e qui riproposto nel dettaglio:
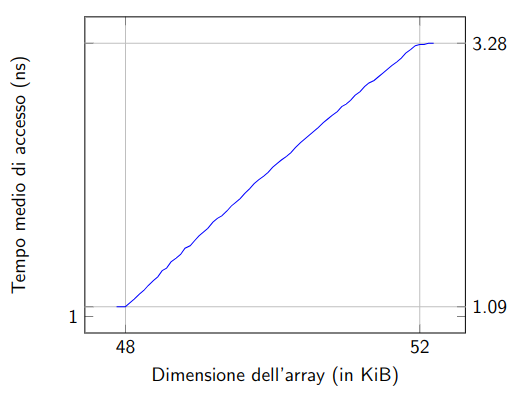
Dalla pendenza del singolo scalino si può dedurre quante cache associative abbiamo.
In questo dettaglio ricaviamo che la prima cache ha dimensione 48KiB.