1. Indice
2. DMA
Per trasferire una serie di informazioni alla memoria abbiamo visto fino ad ora due modalità:
- A “controllo di programma”: più veloce per quanto riguarda il trasferimento stesso, ma blocca la CPU per tutta la durata temporale tra il primo trasferimento e l’ultimo;
- Tramite Interruzioni: più lento, ma permette di utilizzare la CPU per eseguire altri processi durante le attese tra un trasferimento e l’altro..
Per entrambe le modalità è previsto il coinvolgimento della CPU, che dovrà eseguire prima una lettura (registro pronti, RAM $\to$ CPU) e poi una scrittura (CPU $\to$ IO), comportando due scambi dati sul bus
La modalità DMA (Direct Memory Access) prevede invece che sia direttamente il dispositivo ad eseguire le operazioni di lettura o scrittura necessarie sulla RAM, senza coinvolgere la CPU.
Per fare ciò si dotano i dispositivi di un software particolare che eseguirà in autonomia un trasferimento dati dal dispositivo verso un buffer in RAM (ingresso/lettura) o viceversa (uscita/scrittura).
Supponiamo che il buffer si trovi all’indirizzo b e sia grande n byte (comunicati al dispositivo), occupando quindi gli indirizzi [b, b+n). Una volta ottenuti questi dati il dispositivo si preoccuperà di eseguire autonomamente le operazioni in RAM.
Ovviamente il dispositivo deve essere dotato di:
- un
sommatoreche gli permetta di calcolare da solo gli indirizzi necessari a partire dab - un
contatoreche decrementinogni volta che è stato completato un trasferimento.
Quando tutti i byte sono stati trasferiti il dispositivo segnalerà l’informazione settando opportunamente un suo registro di stato (tipicamente generando un’interruzione).
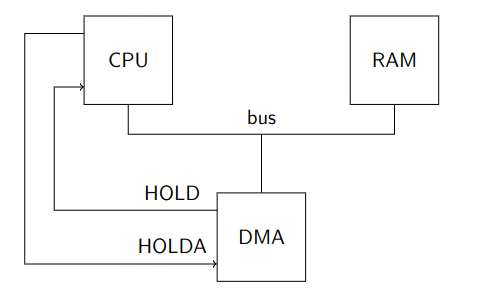
Struttura DMA dal punto di vista hardware (rimuovendo temporaneamente cache, MMU e bus PCI)
L’accesso alla RAM è arbitrato tramite i collegamenti HOLD/HOLDA fra dispositivo e CPU, che fanno da handshake.
Infatti poiché comunicano tutti sullo stesso bus vogliamo che la comunicazione sia esclusiva, per evitare corse e più dispositivi che inviano dati in contemporanea.
La comunicazione si sviluppa così:
- Il dispositivo mantiene normalmente i suoi piedini di uscita in
alta impedenza - Ogni volta che il dispositivo vuole eseguire un trasferimento sul bus, attiva
HOLD; - La CPU termina l’eventuale trasferimento in corso (che può essere anche nel mezzo di una istruzione), mette i suoi piedini di uscita in alta impedenza e attiva
HOLDA; - Il dispositivo attiva i suoi piedini di uscita ed esegue il trasferimento, quindi rimette le uscite in alta impedenza e disattiva
HOLD; - La CPU disattiva
HOLDA, attiva i suoi piedini e riprende il suo normale funzionamento.
In pratica, la CPU si mette in attesa dando la precedenza al DMA nell’accesso al bus. Questa tecnica è chiamata “cycle stealing”, in quanto il DMA “ruba” cicli di bus alla CPU.
Questo porta un rallentamento nell’esecuzione delle istruzioni, poiché molte rischiano di andare in attesa per un tempo indeterminato nel caso in cui il DMA fosse sempre in accesso alla RAM.
Tuttavia il meccanismo resta vantaggioso in almeno tre casi:
-
Se la CPU è più lenta della RAM. Era comune negli home computer degli anni ‘80, dove il
DMAera utilizzato per trasferire i dati di una schermata dalla RAM alla scheda video mentre la CPU eseguiva il programma che preparava la schermata successiva. Oggi questo caso è impensabile. -
Se il trasferimento a controllo di programma non è abbstanza veloce per il dispositivo
-
Se il dispositivo deve trasferire i dati con più urgenza di quanto permesso dal meccanismo delle interruzioni
Gli utlimi due scenari possono verificarsi anche oggi, basta pensare ad alcune schede di rete che possono ricevere o inviare decine di milioni di pacchetti al seconda a velocità di 200 Gbps.
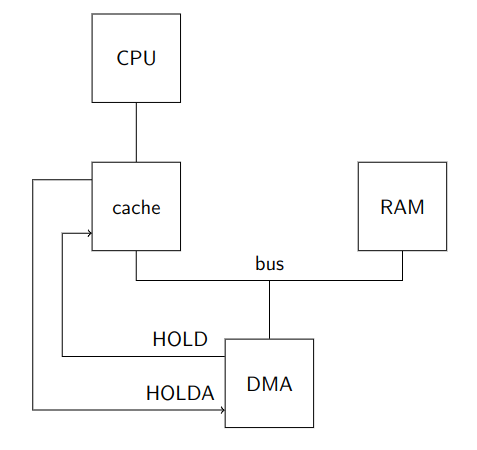
2.1. Interazione con la cache
Se inseriamo la cache notiamo subito che i segnali HOLD/HOLDA si collegano ora al controllore cache, in quanto è lui ad essere collegato al bus e non più la CPU.
Viene quindi introdotto un grande vantaggio:
La CPU, statisticamente, può ora eseguire più istruzioni. Infatti parte delle istruzioi in memoria saranno probabilmente salvate proprio in cache e non richiederanno un’accesso alla RAM.
Questo fatto provoca anche delle complicazioni.
Questi problemi nascono dal fatto che le operazioni del DMA potrebbero coinvolgere parti di RAM che erano state precedentemente copiate in cache.
Vediamo come gestire le comunicazioni a seconda che la cache segua le politica write-through o la politica write-back.
2.1.1. Politica write-through
È il caso più semplice poiché all’inizio del trasferimento tutte le cacheline eventualmente presenti contengono lo stesso valore delle corrispondenti cacheline in RAM.
Questo implica che non ci sono problemi nel caso di operazione di uscita su DMA (lettura), poiché i dati in RAM sono aggiornati coerentemente con le modifiche salvate nelle cacheline.
Nel caso di operazione di ingresso in DMA (scrittura) invece dobbiamo assicurarci che tutte le cacheline coinvolte nel trasferimento vengano rimosse dalla cache, o che siano perlomeno aggiornate.
Esistono due metodi per poter risolvere questo problema, uno al livello hardware e uno a livello software.
Nei processori Intel la soluzione è risolta in hardware.
Si fa in modo che il controllore cache osservi tutte le possibili sorgenti di scritture in RAM attraverso il bus condiviso, processo chiamato di snooping.
Se le linee di controllo identificano un operazione di scrittura, il controllore può usare il contenuto delle linee di indirizzo per eseguire una normale ricerca in cache, e nel caso di hit invalidare in autonomia la corrispondente cacheline.
Se il controllore cache ricevesse in ingresso anche le linee di dati, allora potrebbe addirittura aggiornare la cacheline invece di invalidarla. Questa operazione si chiama snarfing e non prevista nei processori Intel.
Nei sistemi ARM il problema è invece delegato al software, tramite istruzioni dedicate che permettono alla CPU di interagire direttamente con il controllore cache e invalidarne le cacheline.
Il software dovrà quindi eseguire tutte le istruzioni specificando l’intervallo [b, b+n) (allineato opportunamente alle cacheline) subito dopo che il trasferimento sia terminato, così da poter manualmente invalidare gli indirizzi.
2.1.2. Cache con politica write-back
In questa politica le scritture della CPU vengono mantenute soltanto in cache e effettuate in maniera sincrona in secondi momenti (come quando la cacheline dirty verrebbe sovrascritta).
Le cacheline ~dirty invece continuano a contenere le stesse informazioni della RAM.
Questa politica comporta un problema sia nelle operazioni di uscita su DMA, poiché il buffer di lettura in RAM potrebbe contenere memoria non aggiornata, sia per le operazioni di entrata in DMA, dove la faccenda è più complessa.
Infatti, nelle scritture, il DMA potrebbe andare a modificare solo una parte della cacheline dirty, perciò la mera invalidazione porterebbe a perdere le modifiche effettuate sulle parti di cacheline non comprese nel buffer.
2.1.3. Letture
Concentriamoci intanto sull’uscita, ovvero le letture.
Per risolvere possiamo utilizzare la tecinca di snooping, ma in questo caso il controllore cache deve implementare lo snarfing per le cacheline dirty. Nei processori dove lo snarfing non è previsto il protocollo di accesso alla RAM viene modificato in modo che si svolga in più fasi, la prima comune a tutti:
- Il
DMAcomunica al controllore cache gli indirizzi a cui vuole accedere e quest’ultimo risponde con il segnale dihit/misse l’eventuale stato del bitdirty.
Vi possono essere quindi più seconde fasi:
-
miss || (hit && ~dirty): allora si procede normalmente con l’accesso in RAM come visto per ilwrite-through -
hit && dirty: ilDMAinterrompe la richiesta, passando il controllo alla cache, che effettua lawrite-backin RAM. Si può poi proseguire in due modi:- Terminato il
write-back, controllore cache restituisce il controllo alDMAche reinizializza la lettura dei dati ottenendo adesso dati corretti dallaRAM - Mentre il controllore cache comunica le informazioni il
DMAfa snooping con snarfing.
- Terminato il
2.1.4. Scritture
Anche per le operazioni di entrata (scrittura) la struttura è simile. Il primo passo è il medesimo delle letture, successivamente anche qui ci possono essere più seconde fasi:
-
miss: si procede normalmente con l’accesso in RAM -
hit && ~dirty: si invalida lacachelinee si prosegue normalmente -
hit && dirty: si possono percorrere più strade:- Se il
DMAsovrascrivesse un’interacachelineè sufficente invalidarla e scrivere direttamente in RAM (Write and Invalidate) - Altrimenti abbiamo due possibilità:
- Il
DMAlascia il controllo al controllore cache per fargli eseguire ilwrite-backin RAM, quindi riesegue la sua operazione di scrittura - Il controllore cache trasmette la
cacheline dirtysolamente alDMA, invalidando successivamente la propria copia. IlDMAlavora quindi sui dati forniti dal controllore cache, e procede scrivendo in RAM l’interacachelineaggiornata.
- Il
- Se il
Nella soluzione interamente software, la politica più comune è quella di invalidazione senza write back. COnsiste nell’esegiuire sempre il write-back di un certo intervallo di indirizzi (quelli del buffer) prima di avviare il trasferimento, invalidandoli successivamente.
2.1.5. Scrittura di intere cacheline
Nel caso della scrittura su intere cacheline la struttura del buffer [b, b+n) vista dalla cache sarà la seguente:
- Prima sezione da
[b, finePrimaCacheline) - Intere sezioni di
cacheline [inizioUltimaCacheline, n)
Per le sezioni intermedie è possibile fare Write and Invalidate mentre, per quelle iniziali e finali il DMA potrà utilizzare normali scritture con snooping.
Anche nel caso puramente software la sovrascrittura di intere cacheline può essere ottimizzata, grazie all’istruzione di invalidazione senza write-back.
Questa istruzione deve comunque essere effettuata all’inizio del trasferimento, per evitare il write-back di eventuali cacheline dirty sovrascrivendo porzioni di memoria che erano state già modificate dal DMA e che non volevamo modificate.
2.2. Interazione con MMU
La DMA può utilizzare soltanto indirizzi fisici, infatti non interagisce con la MMU.
Tuttavia il software utilizza soltanto indirizzi virtuali [b, b+n).
Sono quindi necessari i seguenti accorgimenti per integrare DMA e MMU:
- Al
DMAandrà comunicato l’indirizzo fisicof(b)e non quello virtualeb - Se l’intervallo
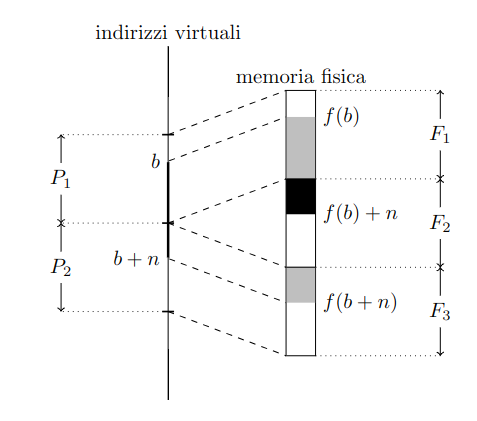
[b, b+n)attraversa più pagine non tradotte in frame contigui, il trasferimento deve essere spezzato in più trasferimenti in modo che ciascuno di essi coinvolga solo frame contigui. - La traduzione degli indirizzi coinvolti in un trasferimento non deve cambiare mentre il trasferimento è in corso
Considerando il punto 1., comunicando b il DMA lo utilizzerebbe come fisico, accedendo a parti di memoria che non centrano niente con il buffer (tranne nei rari casi dove b = f(b)).
Per il punto 2. ipotizziamo invece il caso sulla destra.
Se comunicassimo f(b) ed n, il DMA scriverà su [f(b), f(b) + n), invadendo F2 con effetti disastrosi.
Quello che vogliamo noi è invece l’intervallo fisico [f(b), f(b+n)).
Per poterlo modificare opportunamente il trasferimento, in questo caso, deve essere spezzato in due parti:
[f(b), fineF1)[inizioF3, f(b)+n).
Per il punto 3. immaginando quindi di trovarci in un sistema multiprocesso che realizzi swap-in/out dei processi per poter eseguire più processi di quanti ne possano entrare in RAM.
Supponiamo quindi che un processo P1 avvii un trasferimento in DMA attraverso un buffer privato. È quindi necessario che P1 non venga mai swappato, altrimenti in quegli indirizzi subentrerebbe un processo P2 che vedrebbe la sua memoria privata modificata.
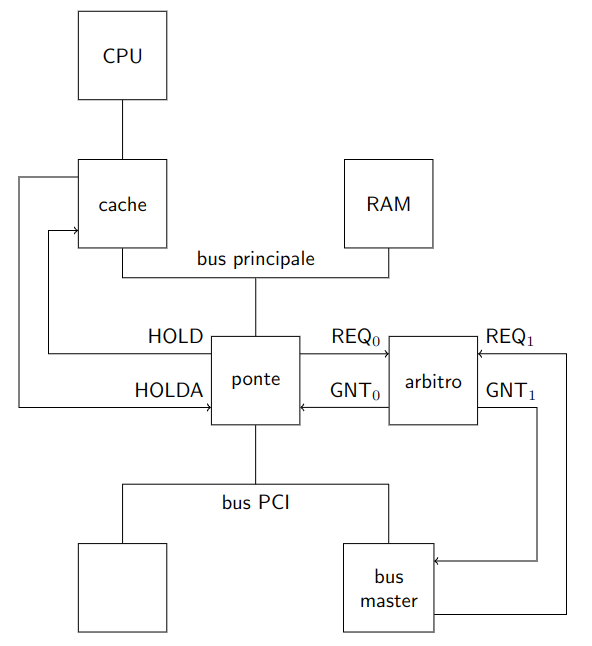
3. PCI Bus Mastering
Un’esempio di architettura con bus PCI è quella nell’immagine sulla destra.
In questo caso, tra le periferiche, l’unica collegata al bus principale è il ponte ospite-PCI. In questa architettura, è proprio lui a pilotare i fili HOLD/HOLDA collagati alla cache.
Avevamo già detto quando abbiamo visto il bus PCI che diversi dispositivi possono agire da bus master ed effettuare trasferimento dati.
Vediamo quindi in particolare come i bus master effettuano trasferimenti da e verso la RAM.
Per essere precisi, in realtà i bus master inizializzano il trasferimento verso il ponte non direttamente verso la RAM. È infatti quest’ultimo che poi reindirizza i dati alla RAM.
Poiché diversi dispositivi possono agire da bus master dobbiamo prevederne un coordinamento, affinché non possano entrare in comunicazione tutti insieme.
Introduciamo quindi un arbitro, un ulteriore dispositivo (spesso integrato nel ponte stesso) che gestisce tramite handshake tutte le richieste di trasferimento.
Quando un bus master vuole iniziare una richiesta invia il segnale di REQ all’arbitro.
Appena è il suo turno l’arbitro invia un segnale chiamato di grant GNT o segnale di acknowledge ACK.
Per ottimizzare i tempi, l’arbitraggio può verificarsi mentre è ancora in corso una precedente transazione.
Infatti il dispositivo che ottiene GNT, prima di iniziare la propria transazione, necessita comunque che sia FRAME# che IRDY# siano disattivati, ovvero che il bus sia libero. Perciò rimarrà in attesa finché la precedente operazione non sarà terminata.
I dispositivi si metteranno quindi autonomamente in coda e partiranno opportunamente e verrano eseguiti immediatamente al termine della transazione in corso.
Le informazioni vengono quindi passate attraverso l’arbitro al ponte, che poi si occuperà di trasferirle al destinatario sul bus principale.
Nonostante il trasferimento avvenga quindi in asincrono, il ponte invia comunque un segnale di trasferimento completato al bus master che si occupa delle operazioni nel momento della ricezione in locale delle informazioni.
Questo permette infatti di ottimizzare i tempi, facendo iniziare un nuovo ciclo di ricezione/scrittura dati, anche quando in realtà le informazioni sono ancora contenute solamente in locale al ponte.
Questa tipo di gestione delle informazioni viene chiamata bufferizzazione.
3.1. Interazione con le interruzioni
Il problema di interazione tra bus mastering e interruzioni sorge proprio per via della bufferizzazione.
Il bus master invia infatti EOI all’APIC nel momento in cui il ponte gli comunica che ha ricevuto l’ultimo pacchetto di dati.
Non è però detto che le informazioni siano ancora state caricate in RAM quando il processore gestirà l’interruzione sollevata dall’APIC.
Esistono diverse soluzioni a questo problema, una puramente software può essere provare a leggere un registro della periferica che si è occupata del trasferimento.
Questa lettura verrà infatti accodata alle altre in attesa sul ponte che si riferiscono al medesimo dispositivo.
Il ponte quindi prima terminerà il trasferimento dei dati in RAM, e solo successivamente riuscirà a compiere la lettura del registro.
Tramite questa lettura, che di per se non ci interssa nel contenuto, siamo invece sicuri che la scrittura in RAM è stata completata, e che quindi possiamo andare a recuperare i dati.
La Intel ha invece proposto una soluzione hardware che collega il ponte all’APIC attraverso un handshake.
L’APIC, quando riscontra una richiesta di interruzione, prima di inviare il segnale alla CPU richiede un segnale di ACK al ponte.
Quest’ultimo lo fornirà solamente quando ha trasferito tutti i dati che contiene fino a quel momento.
Un ultima soluzione moderna prevede invece che le richieste di interruzione non viaggino su linee separate, ma siano inoltrate come speciali transazioni sul bus PCI stesso, sotto forma di scritture a particolari indirizzi chiamati Message Signaled Interrupts. Poiché prima che la richiesta di interruzione arrivi, il buffer del ponte dovrà essere svuotato dai precedenti contenuti, si risolve anche in questo modo il problema delle corse.
4. HD e DMA
Vediamo un esempio pratico di un dispositivo in grado di effettuare DMA, ovvero l’HD.
Dobbiamo però considerare che l’HD che abbiamo a disposizione operava il DMA sul vecchio PC AT. Dobbiamo quindi fornirgli un controllore DMA aggiuntivo che si occupi di effettuare i controlli descritti fin’ora per poter trasferire i dati.
Nei calcolatori con bus PCI il controllore DMA non è più presente, poiché il suo ruolo è stato delegato ad un ponte PCI-SATA.
Il ponte PCI-SATA si comporta infatti da bus master sostituendo a tutti gli effetti il controllore DMA.
L’HD si preoccupa quindi di comunicare con il ponte come se questo fosse il controllore. Il ponte dal suo canto, trasferisce i dati sul PCI in meniera coerente con le regole del bus.
Tutte le operazioni che sono descritte in seguito sono presenti nelle specifiche del nucleo, in particolare nella sezione 3.1.
Le specifiche della programmazione dei Bus Master IDE Controller si può trovare invece a questo link.
L’interfaccia implementa un meccanismo di scatter/gather che permette il trasferimento di grandi blocchi che dovranno essere sparsi/raccolti dalla memoria, utilizzando di fatto buffer discontigui. Grazie a questo meccanismo è possibile diminuire il numero di interrupt al sistema.
Per fornire informazioni sul buffer al controllore è necessario creare un PRD (Physical Region Descriptor) che ha la seguente forma:
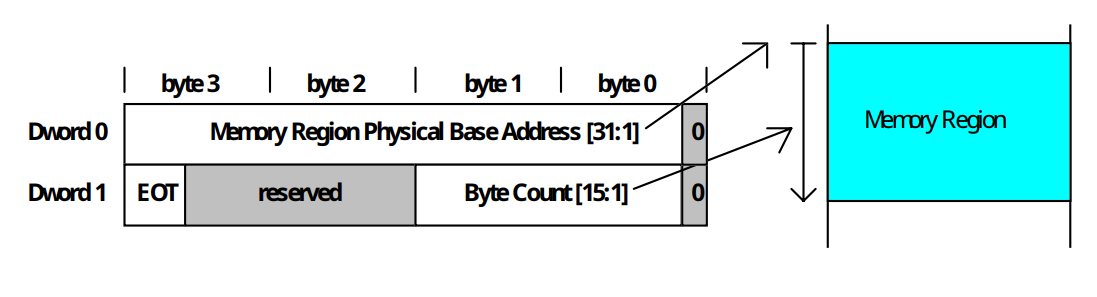
La funzione bus master IDE utilizza 16Byte dello spazio di I/O, accessibili come Byte, Word o Dword.
I registri a disposizione sono i seguenti:(R/W sono diritti in lettura e scrittura. RWC sono diritti in lettura e azzeramento del contenuto)
| Offset | Registro | Diritti di Accesso |
|---|---|---|
0x00 |
Registro di comando Bus Master IDE Primario | R/W |
0x01 |
Specifico del dispositivo | |
0x02 |
Registro di stato Bus Master IDE Primario | RWC |
0x03 |
Specifico del dispositivo | |
0x04 - 0x07 |
Indirizzo tabella PRD Bus Master IDE Primario | R/W |
0x08 |
Registro di comando Bus Master IDE Secondario | R/W |
0x09 |
Specifico del dispositivo | |
0x0A |
Registro di stato Bus Master IDE Secondario | RWC |
0x0B |
Specifico del dispositivo | |
0x0C - 0x0F |
Indirizzo tabella PRD Bus Master IDE Secondario | R/W |
La specifica ci fornisce anche le regole che il dispositivo deve seguire:
4.1. Bus Master IDE Command Register
- Nome del registro:
Bus Master IDE Command Register - Offset dell’indirizzo:
- Canale principale:
base + 0x00 - Canale Secondario:
base + 0x08
- Canale principale:
- Valore di default:
0x00 - Attributi:
R/W - Dimensione:
8bits
| Bit | Descrizione |
|---|---|
7:4 |
Riservati. Devono restituire 0 in lettura. |
3 |
Controllo di lettura o scrittura: 0 per le letture, 1 per scritture. |
2:1 |
Riservati. Devono restituire 0 in lettura. |
0 |
Avvia/Arresta Bus Master: Portato ad 1 per abilitare il funzionamento del bus master. |
4.2. Bus Master IDE Status Register
- Nome Registro:
Bus Master IDE Status Register - Offset:
- Canale Principale:
base + 0x02 - Canale Secondario:
base + 0x0A
- Canale Principale:
- Valore di default:
0x00 - Attributi:
R/W,Clear - Dimensione:
8bits
| Bit | Descrizione |
|---|---|
7 |
Solo simplex: Indica se i canali primario e secondario possono operare contemporaneamente (0) o no (1). |
6 |
Drive 1 DMA Capable: Indica che il drive 1 è capace di trasferimenti DMA e che il controller è ottimizzato. |
5 |
Drive 0 DMA Capable: Indica che il drive 0 è capace di trasferimenti DMA e che il controller è ottimizzato. |
4:3 |
Riservati. Devono restituire 0 in lettura. |
2 |
Interrupt: Indica che il dispositivo IDE ha sollevato un’interruzione. Si azzera scrivendo 1. |
1 |
Errore: Indica un errore nel trasferimento dati. Si azzera scrivendo 1. |
0 |
Bus Master IDE Active: Indica che il bus master è attivo. Si azzera al termine del trasferimento o scrivendo 0. |
4.3. Descriptior Table Pointer register
- Nome Registro:
Descriptor Table Pointer Register - Offset:
- Canale Principale:
base + 0x04 - Canale Secondario:
base + 0x0C
- Canale Principale:
- Valore di default:
0x00000000 - Attributi:
R/W - Dimensione:
32bits
| Bit | Descrizione |
|---|---|
31:2 |
Indirizzo base della Descriptor Table, corrispondono a A[31:2] |
1:0 |
Riservati |
La Descriptor Table deve essere allineata a Dword, e non deve superare il limite di 64KB in memoria.
4.4. Esempio
Esaminiamo quindi un esempio di lettura di una porzione dell’HD:
namespace bm{
ioaddr iBMCMD; // Command Register
ioaddr iBMSTR; // Status Register
ioaddr iBMDTPR; // Descriptor Table Pointer Register
//....
}
using namespace bm;
int main (){
natb nn = BUFSIZE / 512;
natb lba = 0;
natb bus = 0, dev = 0, fun = 0;
vid::clear(0x0f);
if(!bm::find(bus,dev,fun)){
printf("bm non trovato!\n");
pause();
return 0;
}
printf("PCI−ATA at %2x:%2x:%2x\n", bus, dev, fun);
bm::init(bus, dev, fun);
// ...
Dobbiamo innanzitutto trovare il ponte tra i dispositivi PCI installati.
Dalle specifiche ricaviamo che i primi due byte del Class Code del ponte devono valere 0x0101 (sezione 5 punto 1).
Il Class Code è il campo di 3Byte all’offset 9 dello spazio di configurazione PCI.
La funzione bm::find() cerca dunque il primo dispositivo che contenga 0x0101 nella word all’offset 10.
bool bm::find(natb& bus, natb& dev, natb& fun) {
natb code[] = { 0xff, 0x01, 0x01 };
do {
if (pci::find_class(bus, dev, fun, code) && (code[0] & (1U << 7)))
return true;
} while (pci::next(bus, dev, fun));
return false;
}
Le specifiche ci dicono inoltre che l’indirizzo base dei registri del ponte è controllato dalla BAR, che si trova all’offset 36 (sezione 5 punto 2).
Inoltre, sempre nelle specifiche, è indicato che i registri si trovano nello spazio di I/O agli offset 0, 2 e 4 rispetto alla base.
void init(natb bus, natb dev, natb fun) {
natl base = pci::read_confl(bus, dev, fun, 0x20);
// Azzeriamo il bit meno significativo poiché siamo nello spazio di `I/O`.
base &= ~0x1;
iBMCMD = (ioaddr)(base + 0x00);
iBMSTR = (ioaddr)(base + 0x02);
iBMDTPR = (ioaddr)(base + 0x04);
// Settiamo i bit 0 e 2 nel registro `Command` per abilitare il ponte
// per le transazioni di I/O e a operare in bus mastering
natw cmd = pci::read_confw(bus, dev, fun, 4);
pci::write_confw(bus, dev, fun, 4, cmd | 0x5);
}
Otteniamo così la fase e possiamo ottenere gli indirizzi dei tre registri sommandovi gli offset.
Vediamo il continuo del codice:
//...
apic::set_VECT(14, HD_VECT) ;
gate_init(HD_VECT, a_bmide);
apic::set_MIRQ(14, false);
//...
Nelle prime due righe associamo la funzione a_bmide() al piedino 14 dell’APIC, tramite il tipo HD_VECT.
Lo scopo di questa funzione è di invocare c_bmide():
extern "C" void c_bmide(){
done = true;
bm::ack();
hd::ack_intr();
apic_send_EOI();
}
void ack() {
natb work = inputb(iBMCMD);
work &= 0xFE;
outputb(work, iBMCMD);
inputb(iBMSTR);
}
Il driver dovrà quindi solamente farci sapere quando l’operazione è conclusa ponendo la variabile globale done a true, dichiarando diverse variabili:
volatile bool done = false;
extern char vv[];
const natl BUFSIZE = 65536;
extern natl prd[];
extern "C" void a_bmide();
Il contenuto degli nn settori deve essere scritto in vv, dichiarato in Assembler per motivi che vediamo dopo.
#include <libce.h>
.text
.global a_bmide
.extern c_bmide
a_bmide:
salva_registri
call c_bmide
carica_registri
iretq
.data
.balign 4
.global prd
prd: .fill 16384, 4
.balign 4
.global vv
vv: .fill 65536, 1
Per verificare che il contenuto di vv cambierà senza che il nostro programma vi ci scriva direttamente, lo inizializziamo con i caratteri '-'.
//...
for(int i = 0; i < BUFSIZE; i++)
vv[i]='−';
printf("primi 80 caratteri di vv:\n");
for(int i = 0; i < 80; i++)
charwrite(vv[i]);
printf("ultimi 80 caratteri di vv:\n");
for(int i = BUFSIZE − 80; i < BUFSIZE; i++)
charwrite(vv[i]);
//...
Quando l’operazione di Bus Mastering sarà conclusa dovremo trovare che questi caratteri sono stati sostituiti con i byte letti dall’HD della macchina virtuale, con un numero sufficente di caratteri '@'.
Per scrivere nell’HD i 64k caratteri che poi dovranno essere letti si utilizza il seguente comando:
perl -e 'print "@"x65536' | dd of=~/CE/share/hd.img conv=notrunc
Il comando prima della pipe stampa i caratteri, quello dopo li scrive nel file a partire dall’inizio e senza cambiarne le dimensioni.
//...
prd[0] = reinterpret_cast<natq>(vv) ;
prd[1] = 0x80000000 | ((nn * 512) & 0xFFFF);
bm::prepare(reinterpret_cast<natq>(prd), false);
hd::enable_intr();
hd::start_cmd(lba, nn, READ_DMA);
bm::start();
printf("aspetto l'interrupt ...\n");
while(!done)
;
printf("primi 80 caratteri di vv:\n");
for(int i = 0; i < 80; i++)
charwrite(vv[i]);
printf("ultimi 80 caratteri di vv:\n");
for(int i = BUFSIZE − 80; i < BUFSIZE; i++)
charwrite(vv[i]);
pause();
}
Il resto del programma segue abbastanza da vicino lo schema suggerito nella sezione 3.1 delle specifiche:
-
Prepara la tabella dei
PRD - Nella funzione
bm::prepare()scriviamo l’indirizzo di partenza nel registro chiamatoBMDTPR, scegliendo il trasferimento verso la memoria, azzerando i bit diInterrupteErrornel registro di stato:void bm::prepare(natq prd, bool write){ outputl(prd, iBMDTPR); natb work = inputb(iBMCMD); if(write) work &= ~0x8; else work |= 0x8; outputb(work, iBMCMD); work = inputb(iBMSTR); work |= 0x6; outputb(work, iBMSTR); } -
Programmiamo il controllore dell’
HDper il trasferimento inDMAusando la stessa funzionehd::start_cmd()già utilizzata per i normali trasferimenti di lettura e scrittura, con la differenza che nel registroCMDabilitiamo il controllore a inviare ricieste di interruzione - Nella funzione
bm::start()avviamo anche il ponte, ponendo a1loStart Bitnel registroBMCCMD(2.1)void bm::start(){ natb work = inputb(iBMCMD); work |= 1; outputb(work, iBMCMD); } -
Le azioni in questo punto sono svolte dal ponte e dal controllore
-
Aspettiamo quindi che arrivi l’interruzione
- Le azioni da qui descritte sono svolte direttamente dal driver
c_bmide()tramitebm::ack(). Inoltre il driver disabilita ulteriori richieste di interruzione da parte del controllore (anche se non strettamente necessario).
4.4.1. Allineamento e Confini
Alla fine della sezione 1.2 delle specifiche troviamo una nota:
Le regioni di memoria specificate tramite i
PRDnon devono trovarsi a cavallo dei confini di64KiB.
Quello che accade se si attraversano questi confini può avere esiti disastrosi.
Infatti, il sommatore del ponte PCI-ATA potrebbe essere di soli 16bit, e quindi, dato l’indirizzo 0x1122FFFF, passerà poi all’indirizzo 0x11220000 invece che a 0x11230000.
Nell’esempio precedente per vedere questo comportamento è sufficente modificare le seguenti righe:
nn = BUFSIZE / 12;
// ...
// Prima dell'attesa
char *buf = (char *)((natq)&vv & 0xFFFFFFFFFFFF0000);
printf("80 byte all'indirizzo %p\n", buf);
for (int i = 0; i < 80; i++)
vid::char_write(buf[i]);
// ...
// Dopo l'attesa
printf("80 byte all'indirizzo %p\n", buf);
for (int i = 0; i < 80; i++)
vid::char_write(buf[i]);
Abbiamo sostanzialmente due modi per risolvere il problema:
- Allineare il buffer modificando nel file
assemblyla riga.balign 65536prima della dichiarazione divv: - Eseguire più trasferimenti distrinti, in modo che nessuno attraversi un confine
4.4.2. Inizializzare un PRD
Immaginiamo di avere il buffer vv di dimensione n. vv potrebbe iniziare in una pagina, senza riempirla tutta.
Le successive sezioni del buffer completano le pagine nelle quali si trovano.
Potrebbe inoltre capitare che l’ultima sezione termini non in corrispondenza della fine di una pagina, ma anch’essa nel mezzo.
Per fare ciò:
ioaddr iBMPTR, ///< Indirizzo del buffer di destinazione
iBMLEN, ///< Numero di byte da trasferire
iCMD; ///< Registro di comando
paddr f, g;
char* vv;
int totali, rimanenti;
natl mutex = sem_ini(1);
// Suppongo che chi scrive i frame faccia una `sem_signal`
// quando il frame è stato caricato
natl sync = sem_ini(0);
char* tmp = vv;
while(totali > 0){
f = trasforma(tmp);
if(tmp & 0x1){
flog(ERROR_LOG, "indirizzo fisico di una pagina di vv dispari");
return 0;
}
// g primo indirizzo della pagina successiva
g = limit(f)
// Dimensione della porzione da trasmettere
rimanenti = g - f;
// Se siamo alla fine
if(rimanenti > totali){
rimanenti = totali;
}
sem_wait(mutex);
sem_wait(sync);
tmp = g;
totali -= rimanenti;
outputl(f, c->iBMPTR);
outputl(rimanenti, c->iBMLEN);
outputl(1, c->iCMD);
sem_signal(mutex);
}